Rockwell Automation GMLC Reference Manual User Manual
Page 557
Publication GMLC-5.2 - November 1999
520
Fault Variables
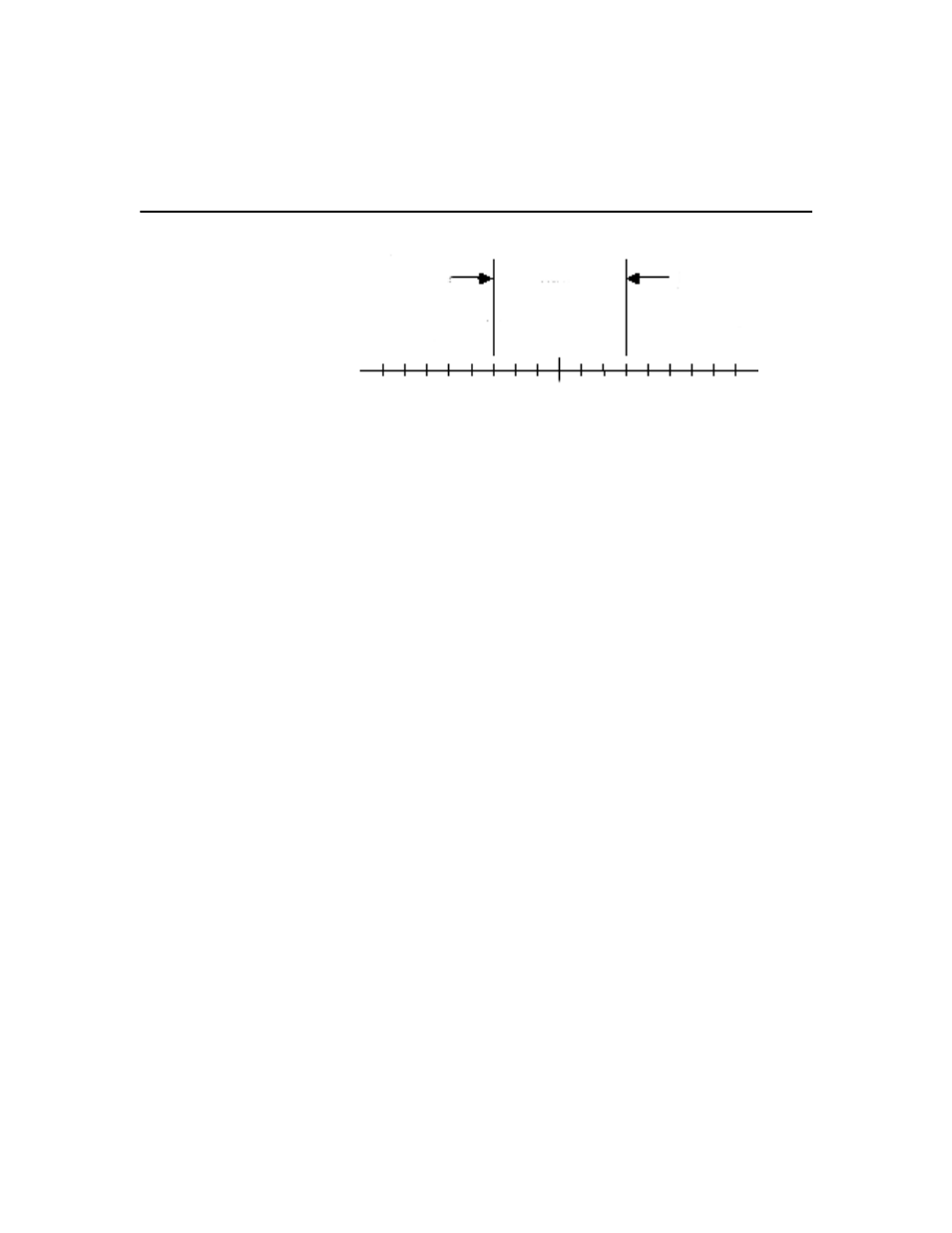
When configured to use soft travel limits, each physical axis of the
motion controller can be further configured to respond to a software travel
fault in different ways. If soft overtravel fault action is set to STOP
MOTION, then when either of the travel limits is exceeded, the axis
immediately decelerates at maximum deceleration to a stop without
disabling feedback or the drive enable output. If DISABLE DRIVE is
selected, when either of the travel limits is exceeded, axis feedback is
immediately disabled, the servo amplifier output is zeroed, and the
appropriate drive enable output is deactivated.
If soft overtravel fault action is set to STATUS ONLY, software overtravel
faults must be handled within the GML Commander diagram. This setting
should only be used in applications where neither the standard STOP
MOTION nor DISABLE DRIVE actions are appropriate. See the Setup
section of the Installation and Setup manual for your motion controller
for more information on configuring the soft overtravel fault action.
To clear a software overtravel fault:
1. Use the Control Settings block to adjust and disable Software
Overtravel Checking (data bit #6).
2. Use the Reset Fault block, set to Axis Fault, to clear the Software
Overtravel fault.
3. Use the Feedback block to enable feedback for the axis.
4. Use the Move Axis block to move the axis to a point that does not
trigger either a hardware or a software overtravel.
Maximum
Negative
Travel
Normal
Axis
Travel
Maximum
Positive
Travel
Software_overtravel
_fault = 0
Software_overtravel
_fault = 0
Software_overtravel
_fault = 1
-
+
0.0
Axis Position