Rockwell Automation GMLC Reference Manual User Manual
Page 165
Publication GMLC-5.2 - November 1999
128
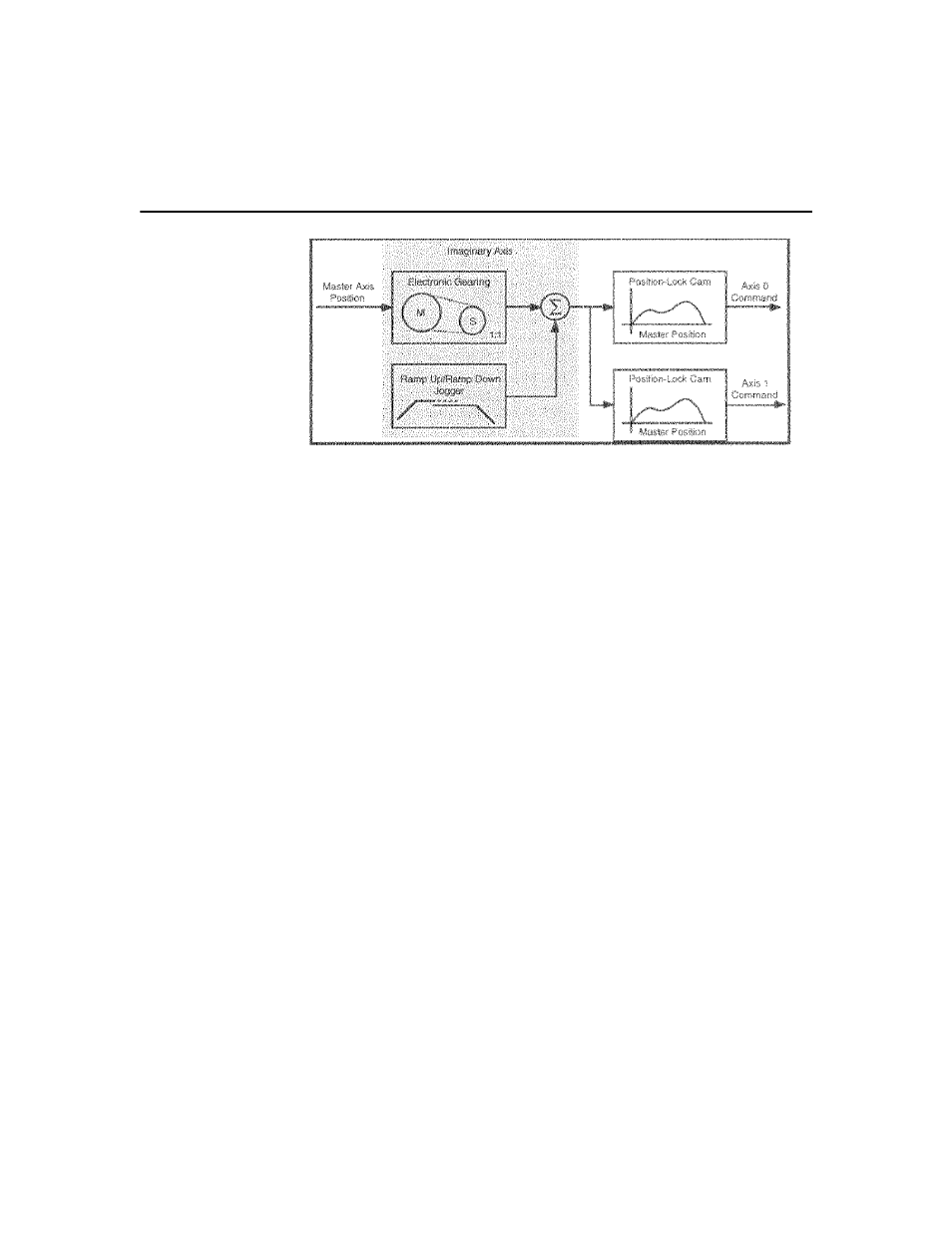
Using the Imaginary Axis
By inserting the imaginary axis between the true master and slave axes,
gearing on the imaginary axis can be turned off to uncouple all the slaves
from the master simultaneously without stopping each position-clock
cam. In addition, by jogging or moving the imaginary axis, you can move
the slaves together without loss of synchronization between them. This
allows manual tweaking or offsetting of a synchronized process involving
many axes.
The imaginary axis also makes it possible for two moves to occur
simultaneously on the same axis (one move can be superimposed on top
of another move). This technique is excellent for implementing
continuous slip compensation on a material feeding axis that uses an
absolute move to feed the material and a second encoder riding on the
material to measure the slip.
Because a move is used to implement the feed, another move cannot
ordinarily be superimposed on the feeding move to do continuous slip
compensation. While the endpoint of the feed move could be changed
while the move is in progress using another move command, this
approach has a number of disadvantages:
•
To avoid the axis hopping into final position, the corrections can only
be made while the axis is moving. Thus, any slip that occurs after the
last correction but before the axis stops is not compensated.