Rockwell Automation GMLC Reference Manual User Manual
Page 553
Publication GMLC-5.2 - November 1999
516
Fault Variables
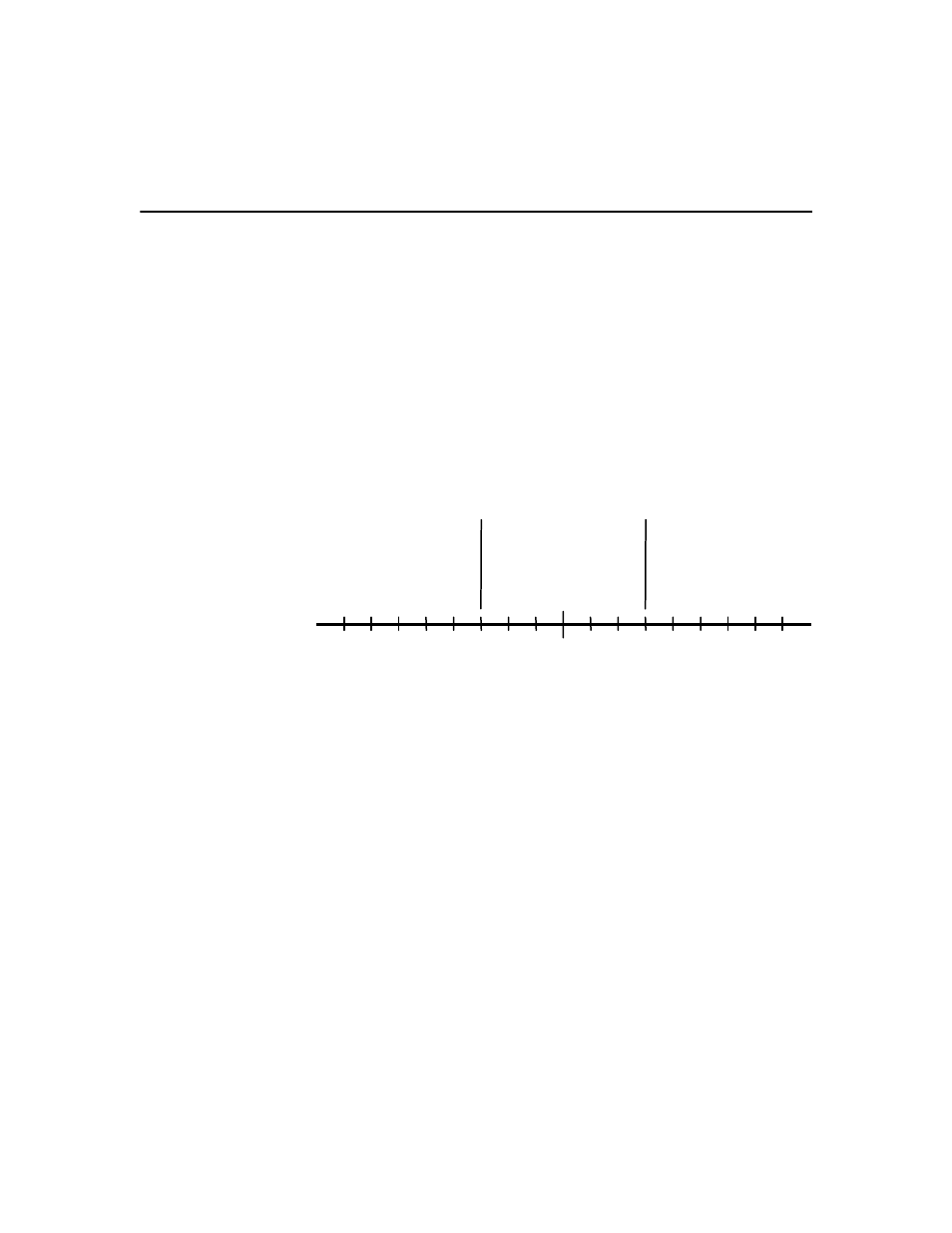
When evaluated in an expression, the value of the Position_error_fault
variable indicates whether a position error fault has occurred.
When Position_error_fault = 1, Axis_fault = 4, Axis_status = 10 if no
other faults of higher priority are active on the axis, and Global_fault = 4
if no other faults of higher priority are active on any axis. A position error
fault is usually caused by commanding a speed or acceleration that
exceeds the capability of the drive system, a jammed or stuck axis, or a
faulty feedback device.
Position error tolerance is the amount of position error (±) the motion
controller tolerates without causing a position error fault.
See the Setup section of the Installation and Setup manual for your
motion controller for more information on position error tolerance.
Each physical axis of the motion controller can be configured to respond
to a position error fault in different ways. If position error fault action is
set to STOP MOTION, then, when the position error tolerance is
exceeded, the axis immediately decelerates to a stop without disabling
feedback or the drive enable output. If DISABLE DRIVE is selected,
when the position error tolerance is exceeded, axis feedback is
immediately disabled, the servo amplifier output is zeroed, and the
appropriate drive enable output is deactivated.
Position Error
Tolerance
Position Error
Position_error_fault
= 1
0.0
Position_error_fault
= 1
Position_error_fault
= 0
+
–