Rockwell Automation GMLC Reference Manual User Manual
Page 520
Publication GMLC-5.2 - November 1999
483
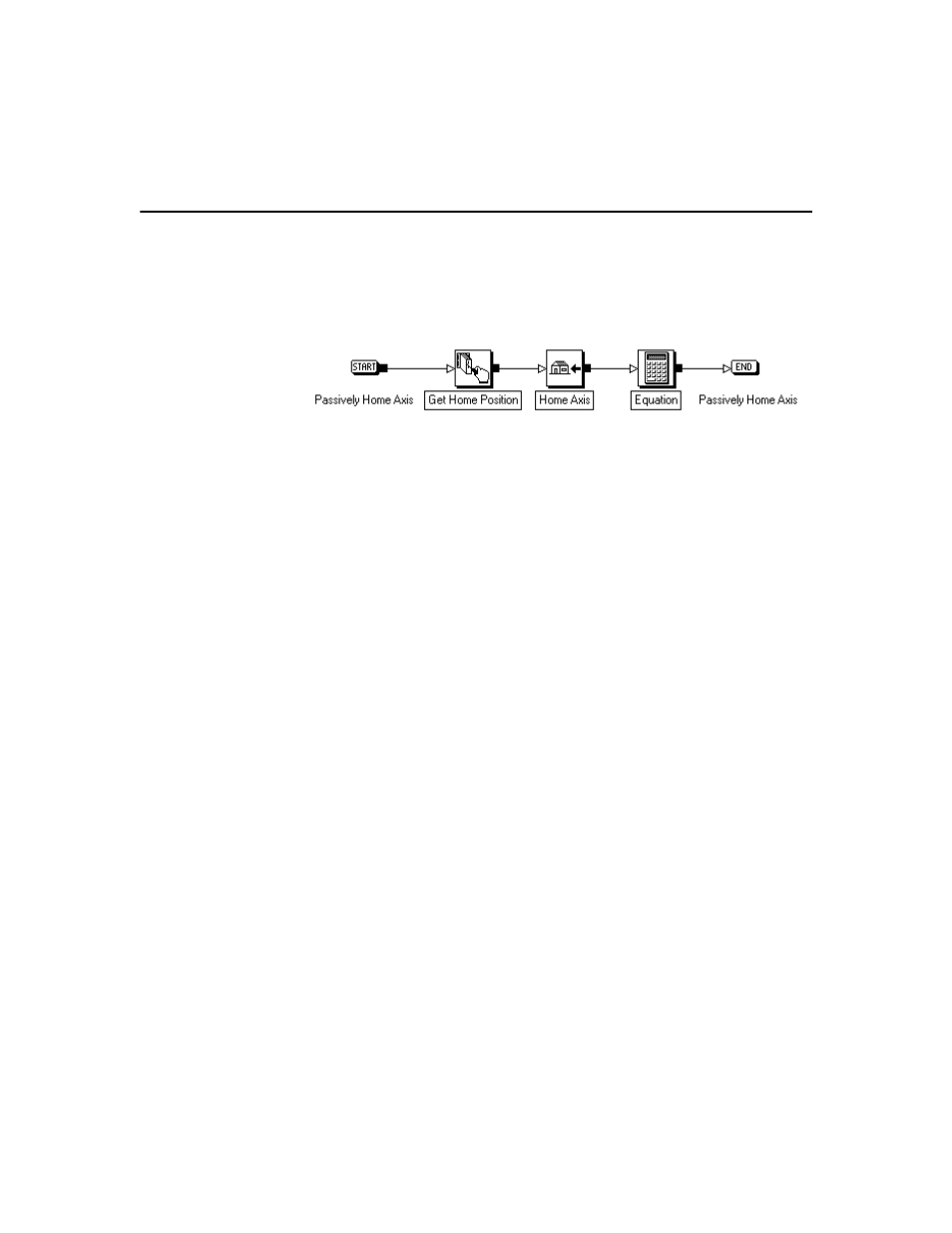
The Passively Home Axis and Calculate Position Change module
included in the GML Commander Module Library under Samples on your
GML Commander disk implements this calculation for Axis 0, as shown
below.
The Get Home Position block reads the Home Position parameter of Axis
0 and stores it in user variable Home_Position_0. The Home Axis block
passively homes the axis and waits for completion.
The Equation block calculates the numerical change in the actual position
of the axis caused by the passive homing operation as follows and stores
the result in user variable Homing_Change_0.
Marker_Distance_AXIS0 - Home_Position_0
Distance To Go
Distance_To_Go is the remaining incremental distance (in the position
units of the axis) left to go in the current move. It is calculated as the
difference between the current command position of a servo or the
imaginary axis, and the programmed destination for the move. In the Tag
Explorer, select both Axis System Variables and the desired axis, then
select Distance_To_Go in the Tag Window.
Deceleration Distance
Decel_Distance is the incremental distance (in axis position units)
required for a servo or imaginary axis to decelerate to a stop from its
current speed using the most recently selected profile. In the Tag
Explorer, select both Axis System Variables and the desired axis, then
select Decel_Distance in the Tag Window.
Important: The Deceleration distance axis system variable does not
apply to jogs.