Rockwell Automation GMLC Reference Manual User Manual
Page 521
Publication GMLC-5.2 - November 1999
484
Motion Variables
Encoder Filter Lag
Encoder_Filter_Lag is used to observe the effect of the Encoder Input
Filter. It reports the existing filter-induced lag between the filtered output
and axis Actual Position. A positive (+) value indicates leading, a
negative (-) value indicates lagging.
Note: This variable appears in the Tag Window only if Master Only
Axis Type is selected in the General Page of the Configure Axis
Use dialog box, and Encoder Filter is selected in the Feedback
Page of that dialog box.
Watch Position
Watch_Position is the current setpoint position of a physical axis or the
imaginary axis (in axis position units), as set up in the last (most recent)
Watch Control block (with Arm Watch Position selected) for that axis.
In the Tag Explorer, select both Axis System Variables and the desired
axis, then select Watch_Position in the Tag Window.
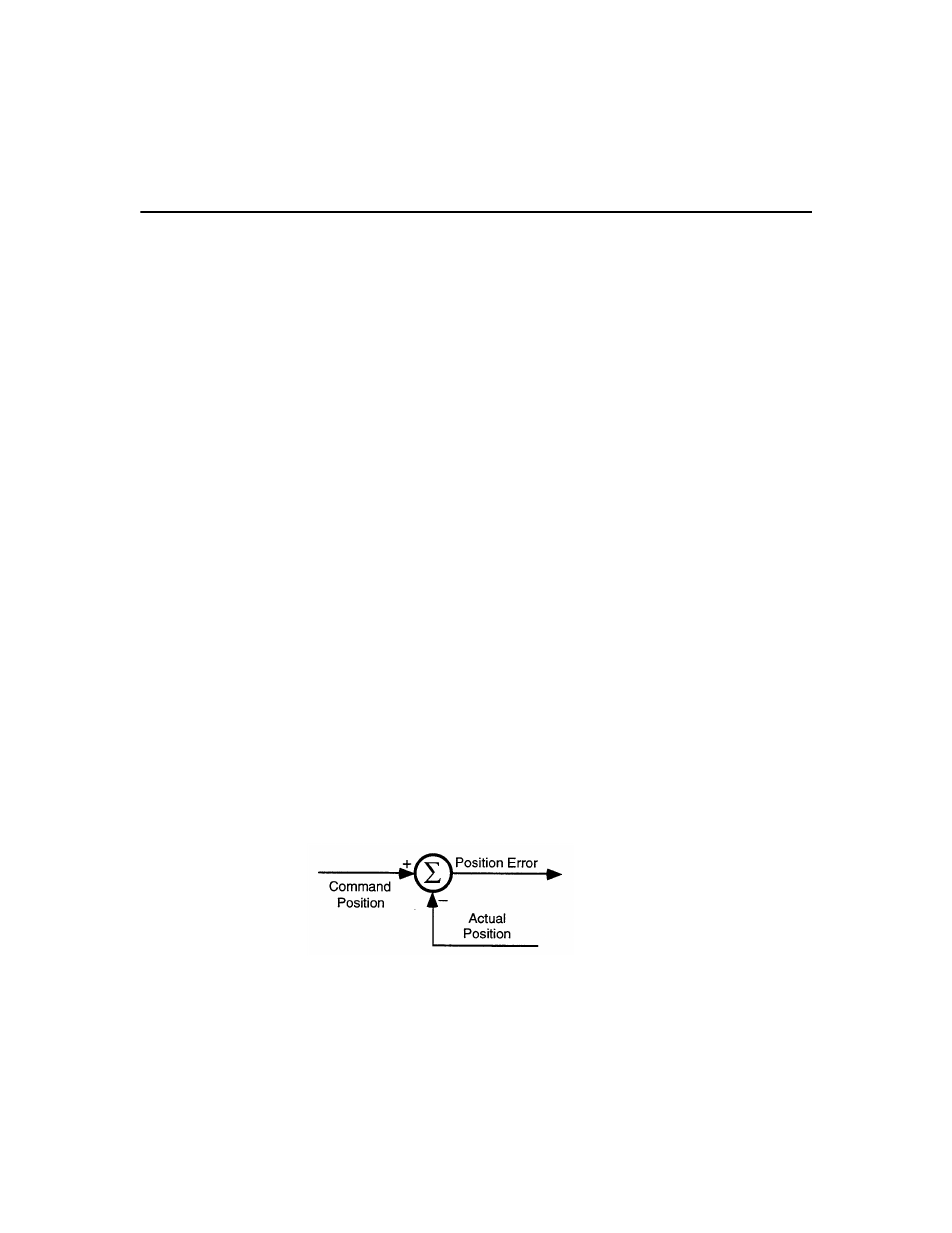
Position Error
Position_Error is the difference (in axis position units) between the
command and actual positions of a servo axis. In the Tag Explorer, select
both Axis System Variables and the desired axis, then select
Position_Error in the Tag Window.
Position error is used to drive the motor to make the actual position equal
to the command position. The figure below shows the relationship of
these three positions.