Rockwell Automation GMLC Reference Manual User Manual
Page 347
Publication GMLC-5.2 - November 1999
310
I/O and Event Blocks
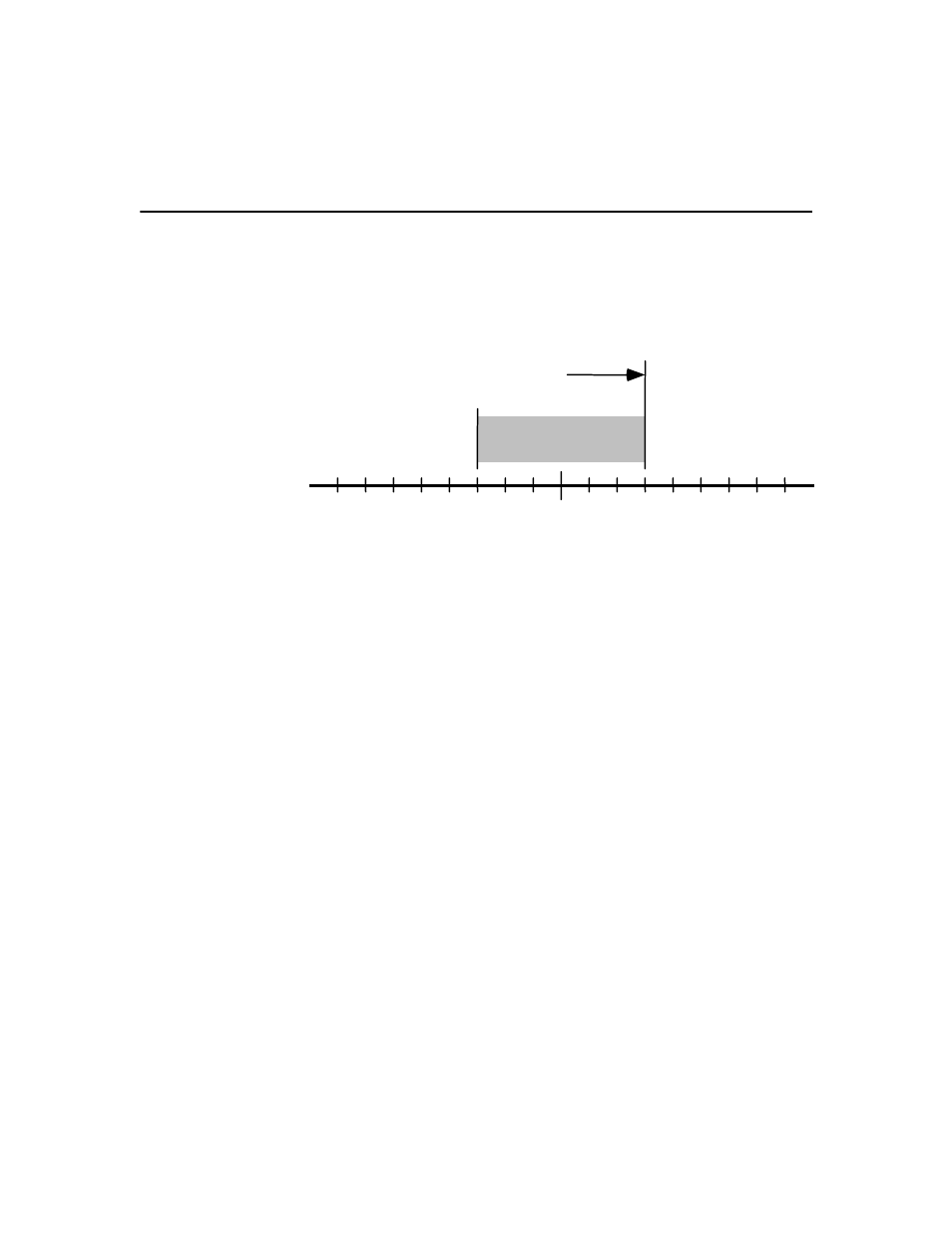
The position lock tolerance is set in the Positioning page of the selected
axis Configure Axis Use dialog box, and specifies how much position
error the motion controller tolerates in a locked condition. It is one of the
factors that determines positioning accuracy. The Position Lock Tolerance
value is interpreted as a ± quantity.
See the Setup section of the Installation and Setup Manual for more
information on position lock tolerance. See the Axis Locked and Axis
Done Conditions chapter in this manual for further discussion of the axis
locked status condition.
Merge Pending / Merging Done
When you select Merge Pending in If Axis mode, the program branches to
the top (true) node if a new motion segment using the selected
interpolator is currently waiting to be merged into the current axis motion
(Merge_status_Interp0 or …Interp1 = 1).
When you select Merging Done in Wait for Axis mode, the current task
pauses until the previous motion caused by the selected interpolator has
been completely merged (Merge_status_Interp0 or …Interp1 = 0) into the
new interpolated move.
Moving / Moving Done
When you select Moving in If Axis mode, the program branches to the
top (true) node if the selected physical or imaginary axis is currently
being commanded to move or is executing a time-lock cam
(Move_status = 1).
Position Lock
Tolerance
Position Error
0.0
+
–
Programmed Position
Lock Tolerance Value