Rockwell Automation GMLC Reference Manual User Manual
Page 256
Publication GMLC-5.2 - November 1999
Gear Axes
219
Changing virtual master axes on the fly is similar to changing physical
Master Only master axes, but with one exception. When the new virtual
axis is enabled, the other virtual axis is automatically disabled. Because
enabling a virtual axis can take up to 10 milliseconds, there can be a short
period of time when no master is active. If the slave axis is moving, this
produces a discontinuity in its motion.
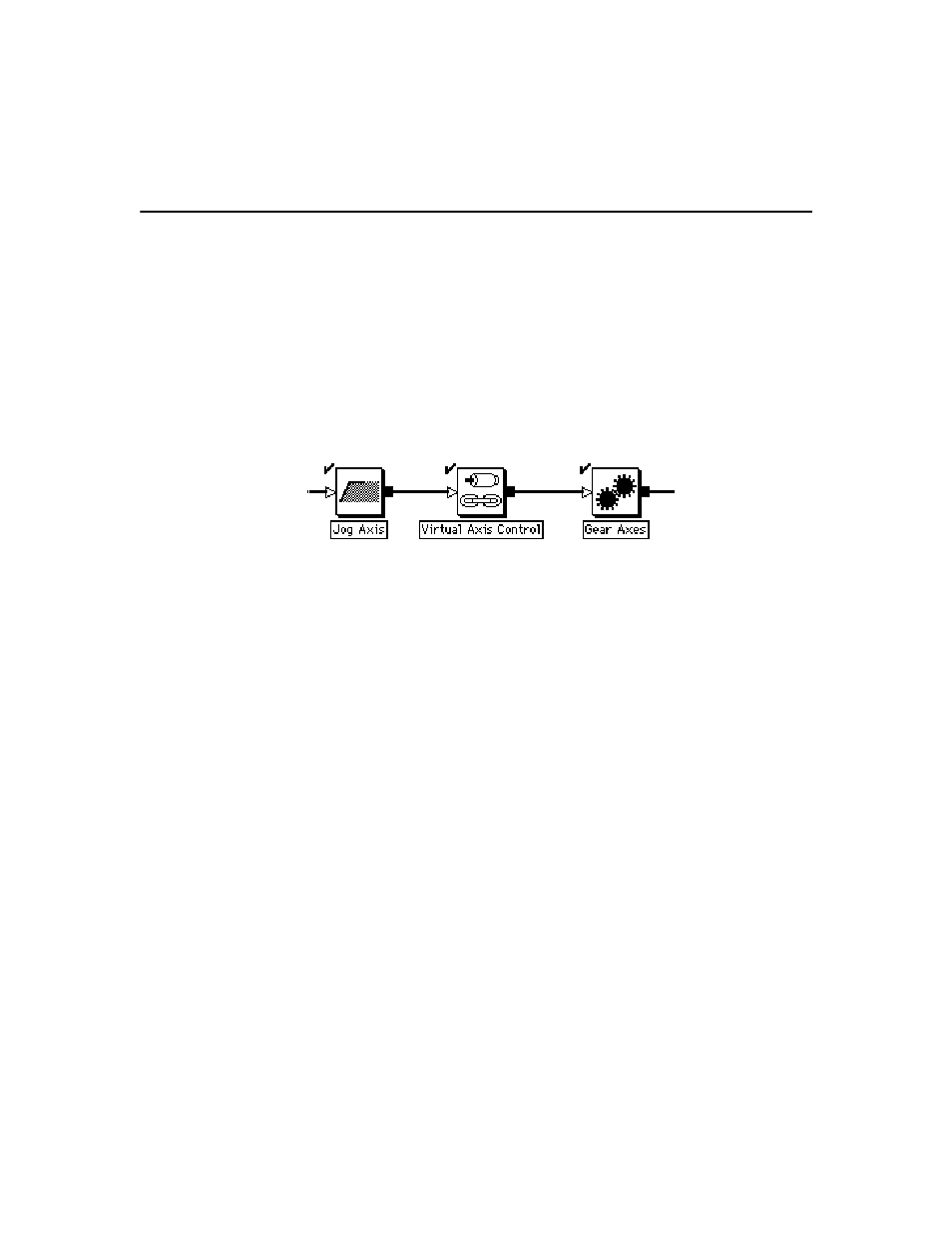
To eliminate this problem, merge the existing gearing motion to a jog,
enable the new virtual axis, and then merge the jog to gearing with the
new master axis, as shown below.
In the Jog Axis block, select Merge from Cam or Gear and select At
Current Speed from the menu. This causes the slave axis to continue
moving at its current speed and turns gearing off. Enable the desired new
virtual master axis in the Virtual Axis Control block and select Wait for
Linked. In the Gear Axis block, select the newly enabled virtual axis as
the master axis, and select Ramp to Master Speed. This causes the slave
axis to ramp smoothly to its new gearing speed. See the Virtual Axis
Control Block in the AxisLink Block chapter for more information.
Moving While Gearing
You can use an incremental Move Axis block for the slave axis (or master
axis if configured for servo operation) while the electronic gearing is
enabled. This is particularly useful to accomplish phase advance/retard
control. You can use the incremental move distance to eliminate any
phase error between the master and the slave, or to create an exact phase
relationship.
Normally a gear ratio of 1 is used with phase adjustment. A 1:1 ratio
ensures that the computed phase error does not change before performing
the move to correct it. Electronic gearing is not normally used with
absolute moves, because the ultimate endpoint is not predictable.