Delta Electronics Programmable Logic Controller DVP-PLC User Manual
Page 569
9 Application Instructions API 150-199
DVP-PLC Application Manual
9-97
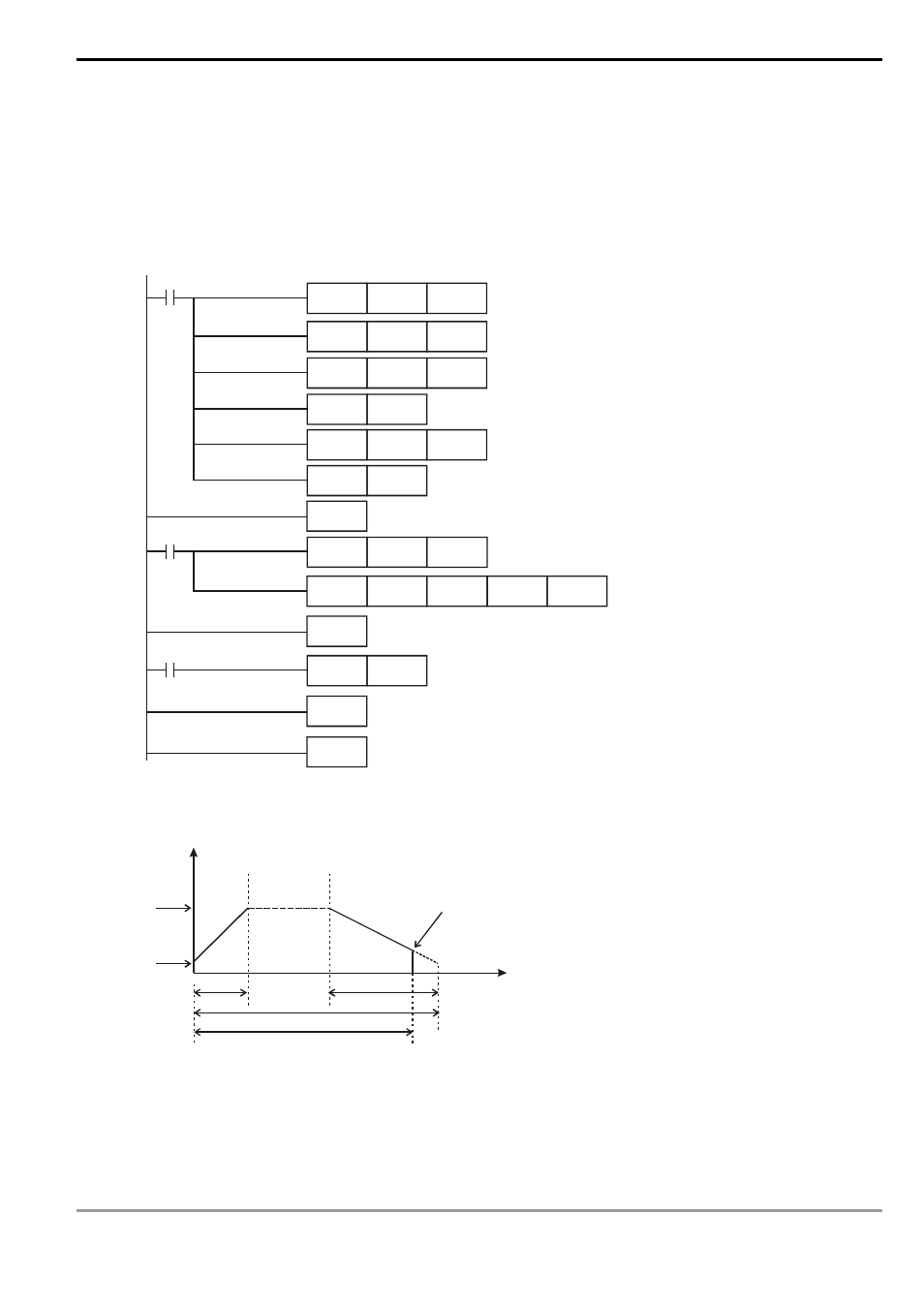
Program Example:
1. Assume we adopt X0 as the external interruption, together with I001 (rising-edge trigger) interruption program;
target number of feedbacks = 50,000; target frequency = 10KHz; Y0, Y1 (CH0) as output pulses; start/end
frequency (D1340) = 200Hz; acceleration time (D1343) = 300ms; deceleration time (D1348) = 600ms;
percentage value (D1198) = 100; current number of output pulses (D1336, D1337) = 0.
2. Write the program codes as follows:
M1002
M1000
M0
I 010
MOV
K100
D1198
K300
D1343
K600
D1348
SET
DMOV
K0
D1336
M1534
RST
C251
EI
DCNT
C251
K100000
DCLLM
X0
K50000
K100000
Y0
FEND
INC
D0
IRET
END
MOV
MOV
3. Assume the first execution result as:
100KHz
D1340
D1348
D1343
X0 Off --> On
Frequency
Y0 stops output
Time
Number
Estimated number of output pulses: 50,000
Actual number of output pulses (D1336, D1337) = K49,200
4. Observe the result of the first execution:
a) The actual output number 49,200 – estimated output number 50,000 = -800 (a negative value). A negative
value indicates that the entire execution finishes earlier and has not completed yet.
b) Try to shorten the acceleration time (D1343) into 250ms and deceleration time (D1348) into 550ms.