Delta Electronics Programmable Logic Controller DVP-PLC User Manual
Page 508
9 Application Instructions API 150-199
DVP-PLC Application Manual
9-36
i. Do not drive the position control instructions which use the same output CH0(Y0, Y1) or CH1(Y2, Y3)
simultaneously. Otherwise, they will be treated as repeated outputs and cannot function normally.
ii. It is recommended that you use the step ladder instruction (STL) to design the position control program
(see the example below).
b) How to use the position control instructions (API 156 ABSR, API 157 PLSV, API 158 DRVI, and API 159
DRVA) and pulse output instructions (API 57 PLSY, API 58 PWM and API 59 PLSR) at the same time.
The position control instruction and pulse output instruction share the 32 bits of the present value register
(D1337 high word; D1336 low word) of CH0 (Y0, Y1) or the present value register of CH1 (Y2, Y3), which will
make the operation complicated. Therefore, it is recommanded that you replace the pulse output instruction
with position control instruction.
c) Explanations on the (Y0, Y1) pulses from CH0 and (Y2, Y3) pulses from CH1.
Voltage range: DC5V ~ DC24V
Current range: 10mA ~ 100mA
Output pulse frequency: Y0, Y2 at 200KHz; Y1, Y3 at 10KHz.
8.
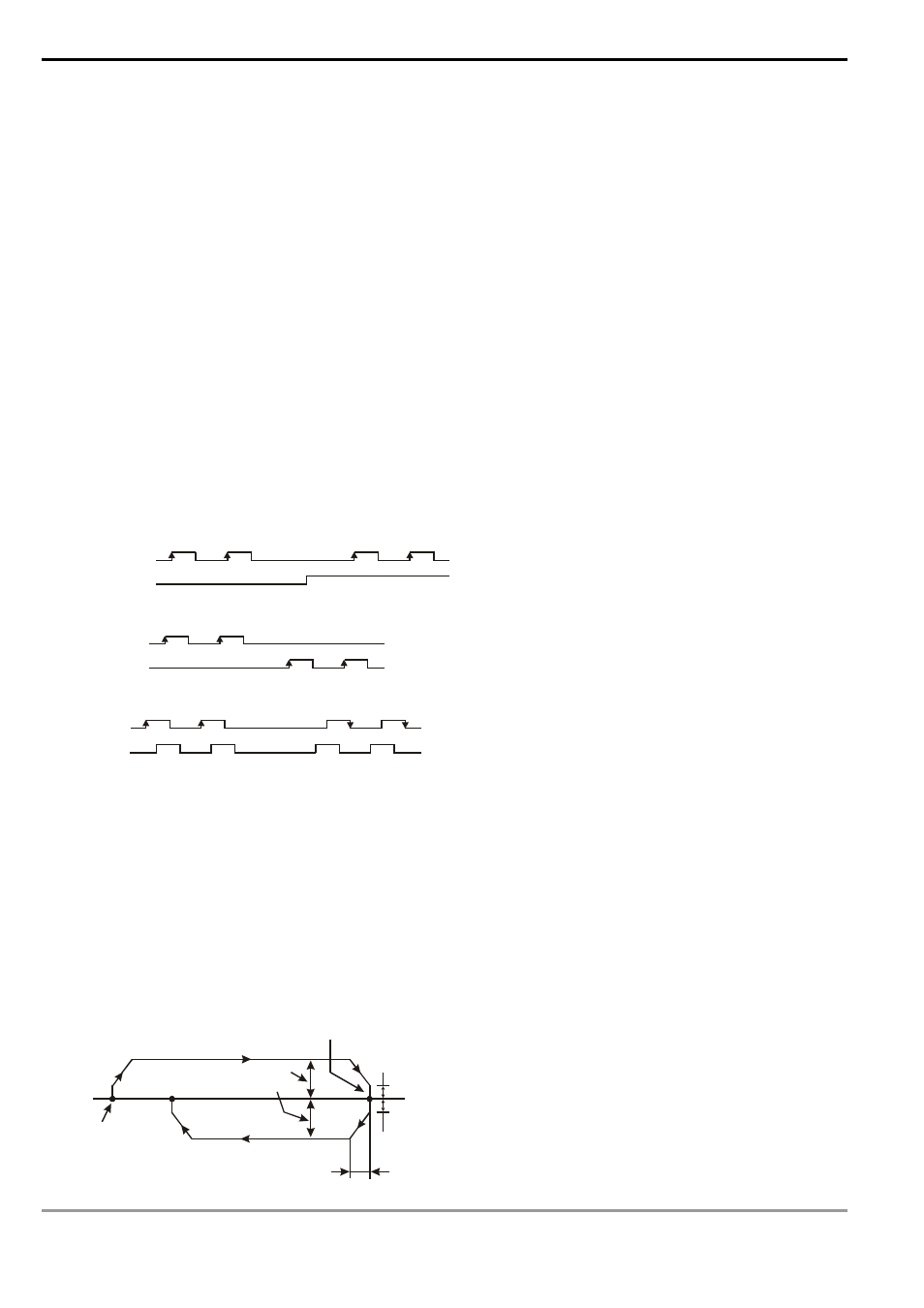
Settings of pulse output signals in the operation of position control for EH/EH2/SV series MPU:
a) Pulse + DIR (recommended)
Pulse
DIR
b) CW/CCW (limited frequency at 10KHz)
CW
CCW
c) A/B-phase output (limited frequency at 10KHz)
A
B
9.
Follow the above output settings of PLC for the pulse input parameters of SERVO AMP or stepping motor.
10. For EH/EH2/SV series MPU, when Y0 output adopts many high-speed pulse output instructions (PLSY, PWM,
PLSR) and position control instructions (ZRN, PLSV, DRVI, DRVA) in a program and these instructions are
executed synchronously in the same scan period, PLC will execute the instruction with the fewest step
numbers.
Programming example for forward/reverse operation:
For the wiring, see the wiring drawing of DVP-EH series and Mitsubishi MR-J2-□A servo drive
One operation mode performs positioning by absolute position:
500Hz
500Hz
500,000
100
200ms
200,000Hz
Zero point
Output pulse frequency
Acceleration/
Deceleration time