Delta Electronics Programmable Logic Controller DVP-PLC User Manual
Page 493
9 Application Instructions API 150-199
DVP-PLC Application Manual
9-21
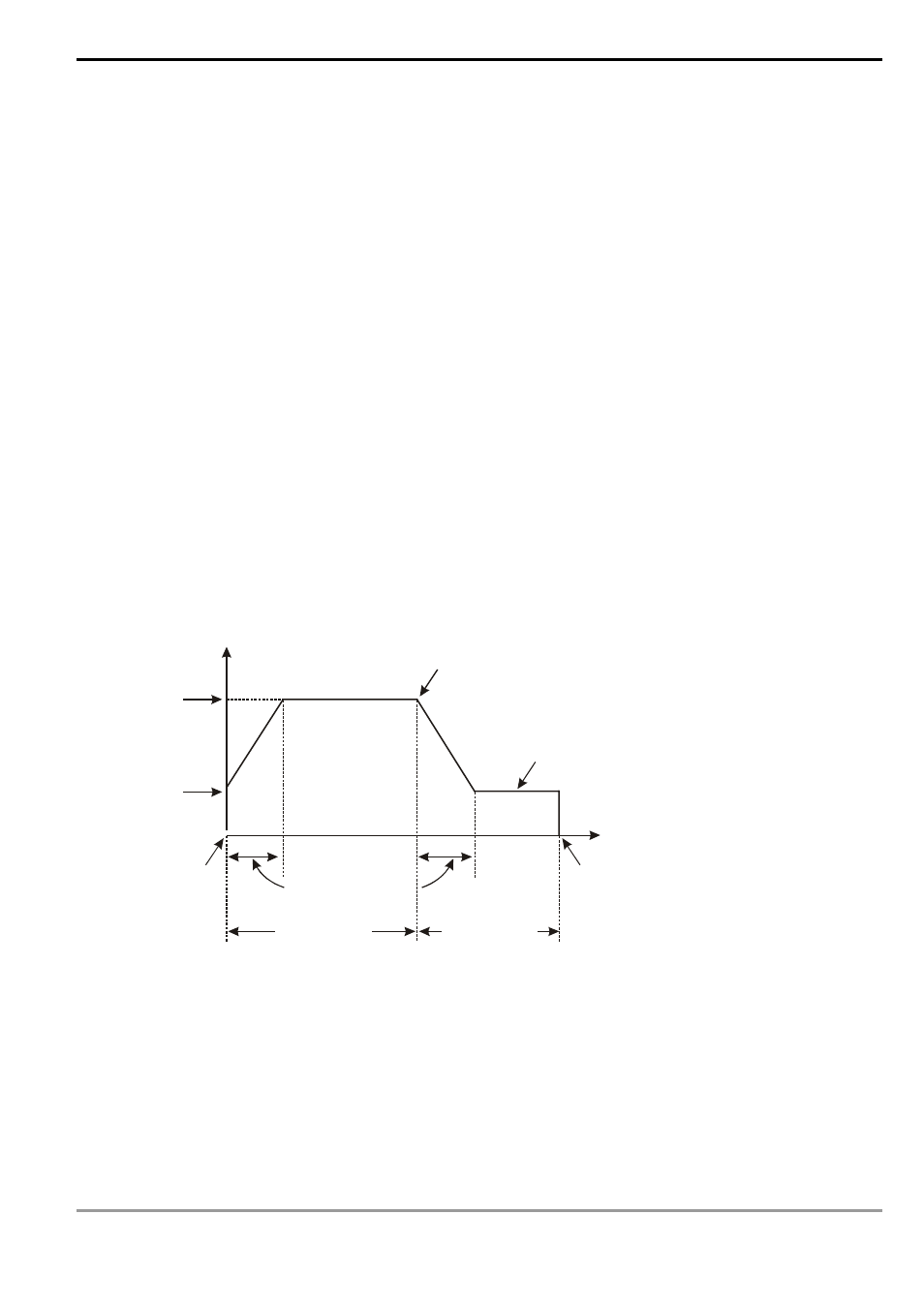
start frequency. The acceleration time of EH/EH2/SV/SC series MPU is set by D1343 (D1353). S1 will start to
move when the acceleration reaches the zero return speed.
b) When the DOG signal goes from Off to On, the zero return speed will decelerate to S
2
by the time set in
D1343 (D1353).
c) When the DOG signal goes from On to Off and the pulse output stops, 0 will be written in the present value
registers (D1337, D1336) of CH0 pulses, D1339 and D1338 of CH1 pulses, D1375 and D1376 of CH2 pulses,
and D1377 and D1378 of CH3 pulses in EH/EH2/SV series MPU; 0 will also be written in D1348 and D1349
of Y10 (CH0) pulses or D1350 and D1351 of Y11 (CH1) pulses in SC series MPU.
d) When the DOG signal goes from On to Off and the reset signal flag M1346 = On, Y4 (CH0) or Y5 (CH1) in EH
series MPU will output a reset signal; Y10 (CH0), Y11 (CH1) , Y12 (CH2) and Y13 (CH3) in EH2/SV series
MPU will output a reset signal.
e) For EH/EH2/SV series MPU, when the pulse output is completed and M1029, M1030, M1036 and M1037 are
enabled, indication flag M1336 sent by CH0 pulses, M1337 by CH1, M1522 by CH2 and M1523 by CH3 will
be Off. For SC series MPU, when the pulse output is completed, M1102 and M1103 will be enabled.
f) Due to that ZRN (DZRN) instruction cannot locate the position of DOG, the zero return can only be done
towards a single direction. In the zero return operation of EH/EH2/SV series MPU, D1337 and D1336
(present value registers) of CH0 pulses or D1339 and D1338 of CH1 pulses are decreasing. In the zero return
operation of SC series MPU, D1348 and D1349 of CH0 pulses or D1350 and D1351 of CH1 pulses are also
decreasing.
S
3
Frequency
near point signal =On
time
near point signal =Off
Enabling
the
instruction
accel/decel. time
D1343
acceleration
deceleration
End frequency (S )
2
Target
frequency
(S )
1
Start
frequency
(S )
2
S
3
g) ZRN (DZRN) instruction is applicable to servo motor with absolute positioning function, e.g. Mitsubishi
MR-J2-A servo drive. Even when the power is switched off, the current position can still be recorded. In
addition, the current position of servo drive can be read by API 155 DABSR of EH/EH2/SV/SV series MPU;
therefore only one zero return operation is required and no zero return has to be done after the power is
switched off.
h) When the drive contact of ZRN instruction is On, CH0 (CH1) will read the acceleration/deceleration time set in
D1343 (D1353) and accelerate to the zero return speed, waiting for the DOG and decelerate to creep speed.
When the DOG is Off, the pulse output will stop immediately.