Delta Electronics Programmable Logic Controller DVP-PLC User Manual
Page 449
8 Application Instructions API 100-149
DVP-PLC Application Manual
8-47
API Mnemonic Operands
Function
132
D TAN P
Tangent
Controllers
ES/EX/SS SA/SX/SC EH/SV
Bit Devices
Word Devices
Program Steps
Type
OP
X Y M S K H
KnX KnY KnM KnS T
C
D
E
F
S
*
*
*
D
*
DTAN, DTANP: 9 steps
PULSE 16-bit 32-bit
ES EX SS SA SX SC EH SV ES EX SS SA SX SC EH SV ES EX SS SA SX SC EH SV
Operands:
S
: Source value D: TAN result
Explanations:
1. 0°
≤ S < 360°. See the specifications of each model for their range of use.
2. Flags: M1018 (angle or radian); M1020 (zero flag)
3. S can be an angle or radian, decided by M1018.
4. When M1018 = Off, the program will be in radian mode and the RAD value = angle ×
π
/180
5. When M1018 = On, the program will be in angle mode and the range of angle should be “0° ≤ angle < 360°”
6. If the result = On, M1020 = On.
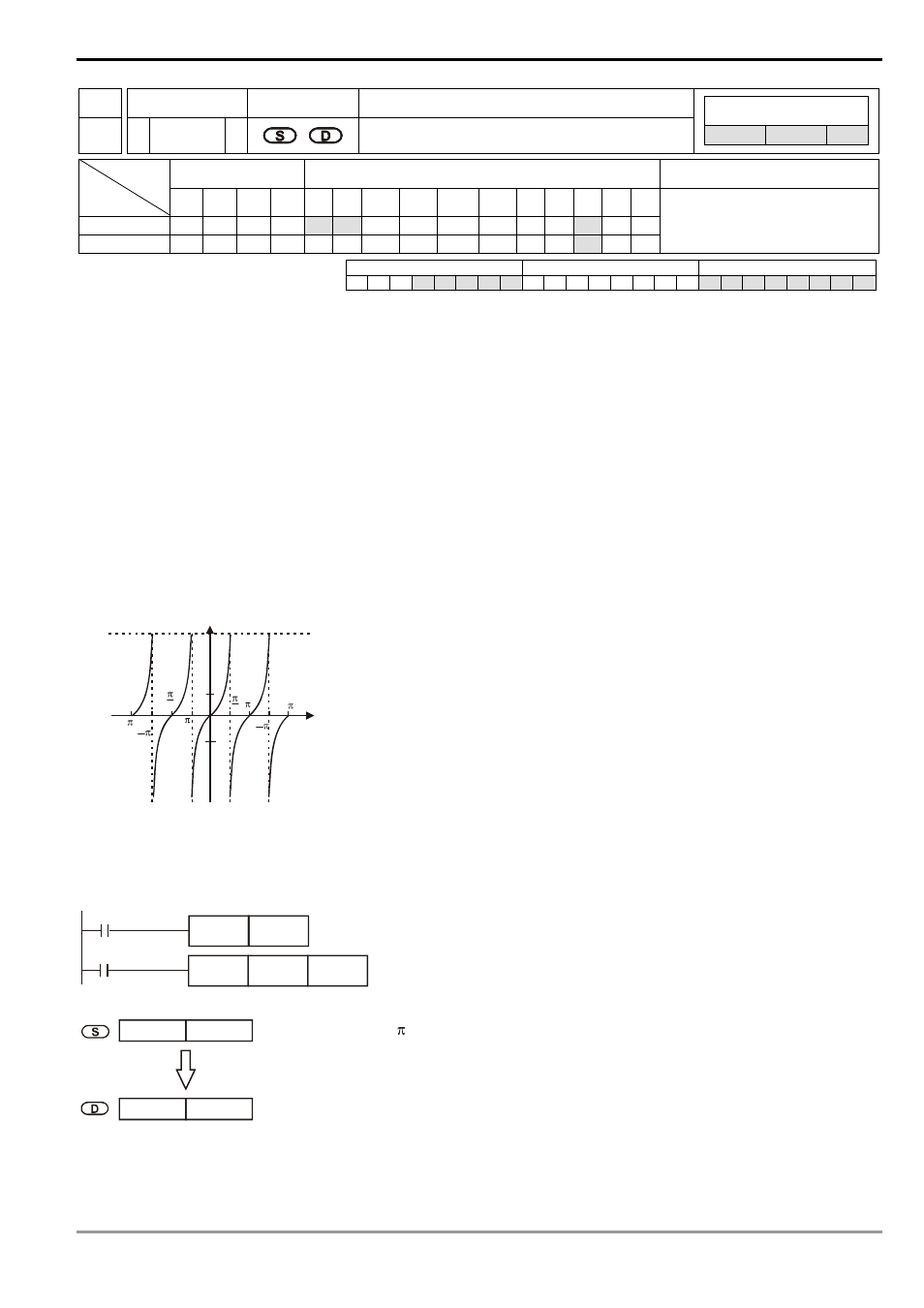
7. The TAN value obtained by S is calculated and stored in the register designated by D. The figure below offers the
relation between radian and the result.
S: Radian
R: Result (TAN value)
R
S
-2
2
3
2
2
2
-
1
-1
0
3
2
-
-
Program Example 1:
When M1018 = Off, the program is in radian mode. When X0 = On, use the RAD value of binary floating point (D1, D0)
and obtain its TAN value. The binary floating point result will be stored in (D11, D10).
M1002
RST
M1018
X0
DTAN
D0
D10
D1
D0
D11
D10
RAD value (angle x /180)
TAN value
binary floating point
binary floating point
Program Example 2:
When M1018 = On, the program is in angle mode. When X0 = On, use the angle of (D1, D0) to obtain TAN value and