Delta Electronics Programmable Logic Controller DVP-PLC User Manual
Page 286
7 Application Instructions API 50-99
D V P - P L C A P P L I C AT I O N M A N U A L
7-2
API Mnemonic Operands
Function
51
REFF P
Refresh and Filter Adjust
Controllers
ES/EX/SS SA/SX/SC EH/SV
Bit Devices
Word Devices
Program Steps
Type
OP
X Y M S K H KnX KnY KnM KnS T C D E F
n
* *
REFF, REFFP: 3 steps
PULSE 16-bit 32-bit
ES EX SS SA SX SC EH SV ES EX SS SA SX SC EH SV ES EX SS SA SX SC EH SV
Operands:
n
: Response time (unit: ms)
Explanation:
1. Range
of
n
: for SA/SX/SC, n = K0 ~ K20; for EH/EH2/SV, n = K0 ~ K60.
2.
To avoid interferences, X0 ~ X17 of EH/EH2/SV series MPU and X0 ~ X7 of SA/SX/SC series MPU are
equipped with digital filters on output terminals. Digital filters adjust the response time by REFF instruction.
This instruction sets up n directly in D1020 (adjusting the response time of X0 ~ X7) and D1021 (adjusting the
response time of X10 ~ X17).
3.
Rules for adjusting the reponse time of the filter at X0 ~ X17:
a) When the power of PLC turns from Off to On or the END instruction is being executed, the response time
will be determined upon the contents in D1020 and D1021.
b) You can use MOV instruction in the program to move the time values to D1020 and D1021 and make
adjustments in the next scan.
c) You can use REFF instruction to change the response time during the execution of the program. The
changed response time will be move to D1020 and D1021 and you can make adjustments in the next scan.
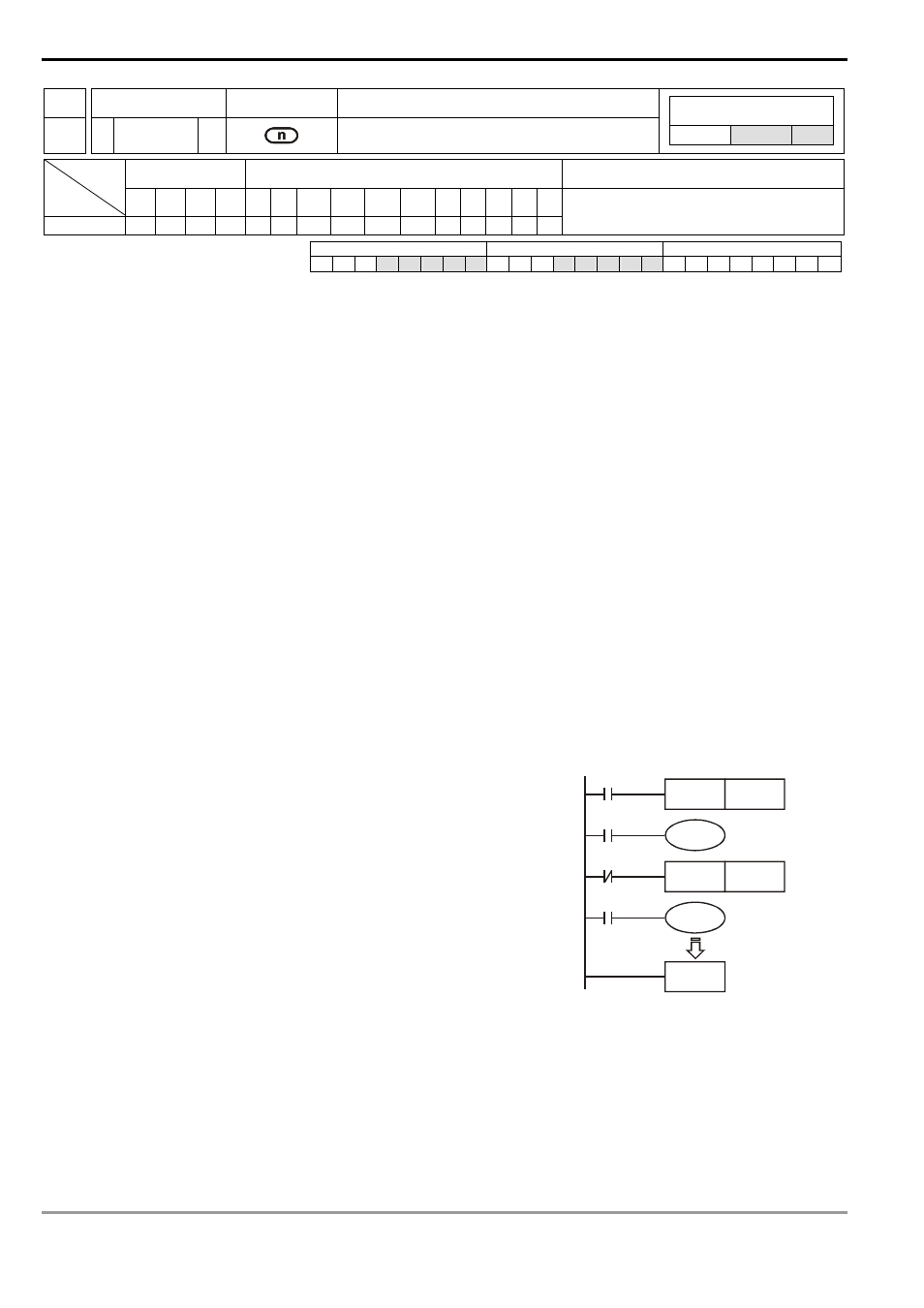
Program Example:
1.
When the power of PLC turns from Off to On, the response
time of X0 ~ X17 will be determined by the contents in D1020
and D1021.
2.
When X20 = On, REFF K5 will be executed and the response
time will be changed to 5ms for the adjustment in the next
scan.
3.
When X20 = Off, the REFF K20 will be executed and the
response time will be changed to 20ms for the adjustment in
the next scan.
X20
REFF
K5
X0
Y1
X20
REFF
K20
X1
Y2
END
Remarks:
When inserting an interruption subroutine in the program or using the high speed counter or API 56 SPD instruction,
the corresponding signals at the input terminals will not delay and has nothing to do with this instruction.