Dvp-plc application manual – Delta Electronics Programmable Logic Controller DVP-PLC User Manual
Page 498
9 Application Instructions API 150-199
DVP-PLC Application Manual
9-26
+3,000
-3,000
0
Current
position
F0 the first acceleration
s egm ent
The last deceleration
s egm ent
(D1340) M in: 10Hz
b) Settings of relative positioning and the acceleration/deceleration speed:
Default: 100ms
(D1343)
(D1343)
Default: 200,000Hz
Output pulse
frequency
Max. speed
(D1342, D1341)
Current
position
Output pulse
numbers
Accel/Decel time
Accel/Decel time
Default:100ms
Acceleration
sampling time
Acceleration
slope
First acceleration
segment (D1340)
Min: 10Hz
Last deceleration
segment (D1340)
Min: 10Hz
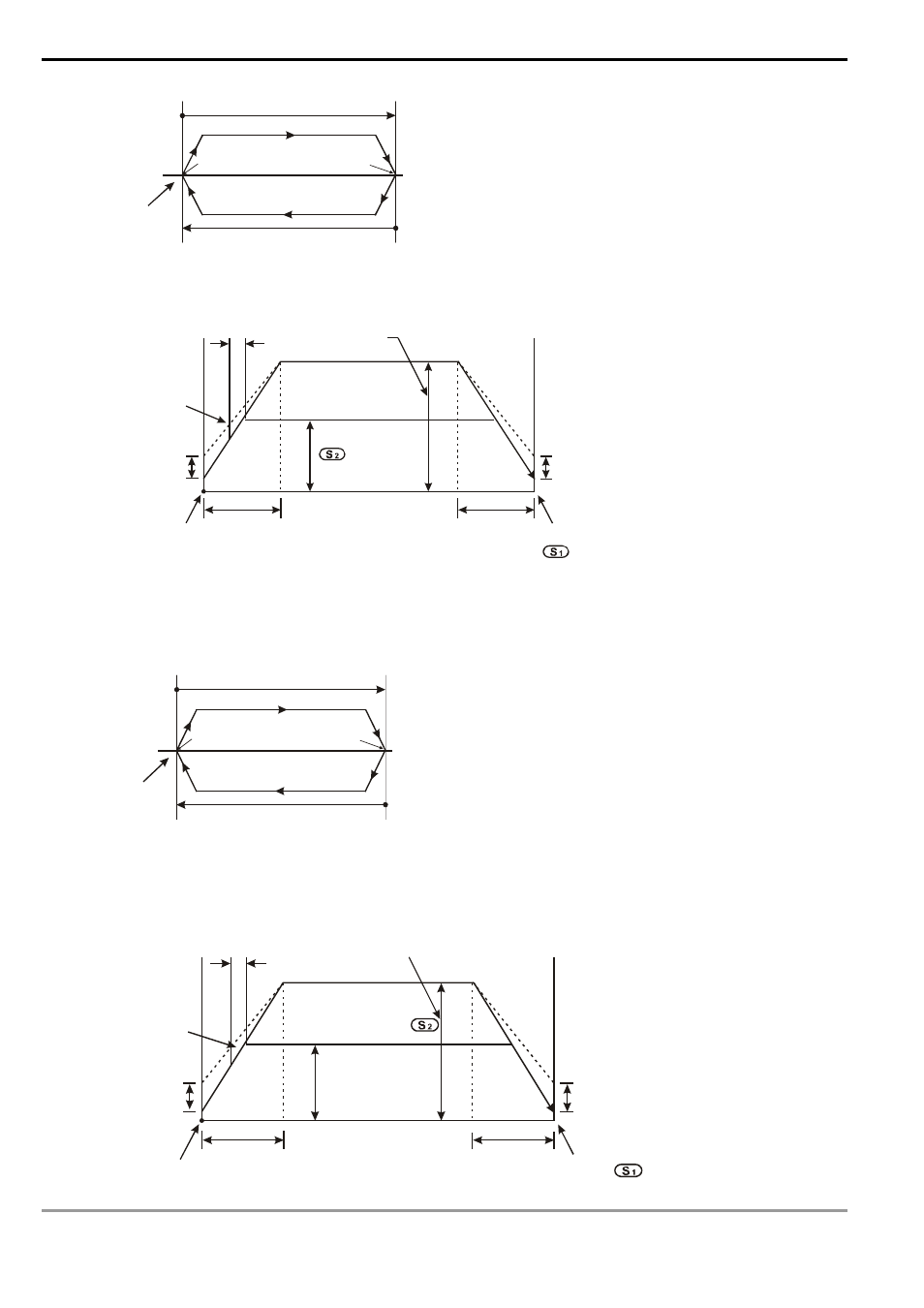
2.
Explanations on SC series MPU:
a) Relative position control: Designating the traveling distance starting from the current position by “+/ -“ signs;
also known as a relative driving method.
+3,000
-3,000
0
Current
position
F0 the first acceleration
segment
The last deceleration
segment
Y10 (D1340)
Y11 (D1352) Min: 10Hz
b) Settings of relative positioning and the acceleration/deceleration speed: D1343 (D1353) is for settings of the
time of the first acceleration segment and last deceleration segment of Y10 (Y11). D1340 (D1352) is for
settings of start/end frequency of Y10 (Y11).
Acceleration
slope
Acceleration
sampling time
output pulse frequency
accel/decel time
accel/decel time
Current
position
The first acceleration
segment
Y10 (D1340)
Y11 (D1352)
Min: 100Hz
Default: 200ms
Y10 (D1343)
Y11 (D1353)
The last deceleration
segment
Y10 (D1340)
Y11 (D1352)
Min: 100Hz
Default: 200ms
Y10 (D1343)
Y11 (D1353)
Output pulse
numbers