Delta Electronics Programmable Logic Controller DVP-PLC User Manual
Page 392
7 Application Instructions API 50-99
D V P - P L C A P P L I C AT I O N M A N U A L
7-108
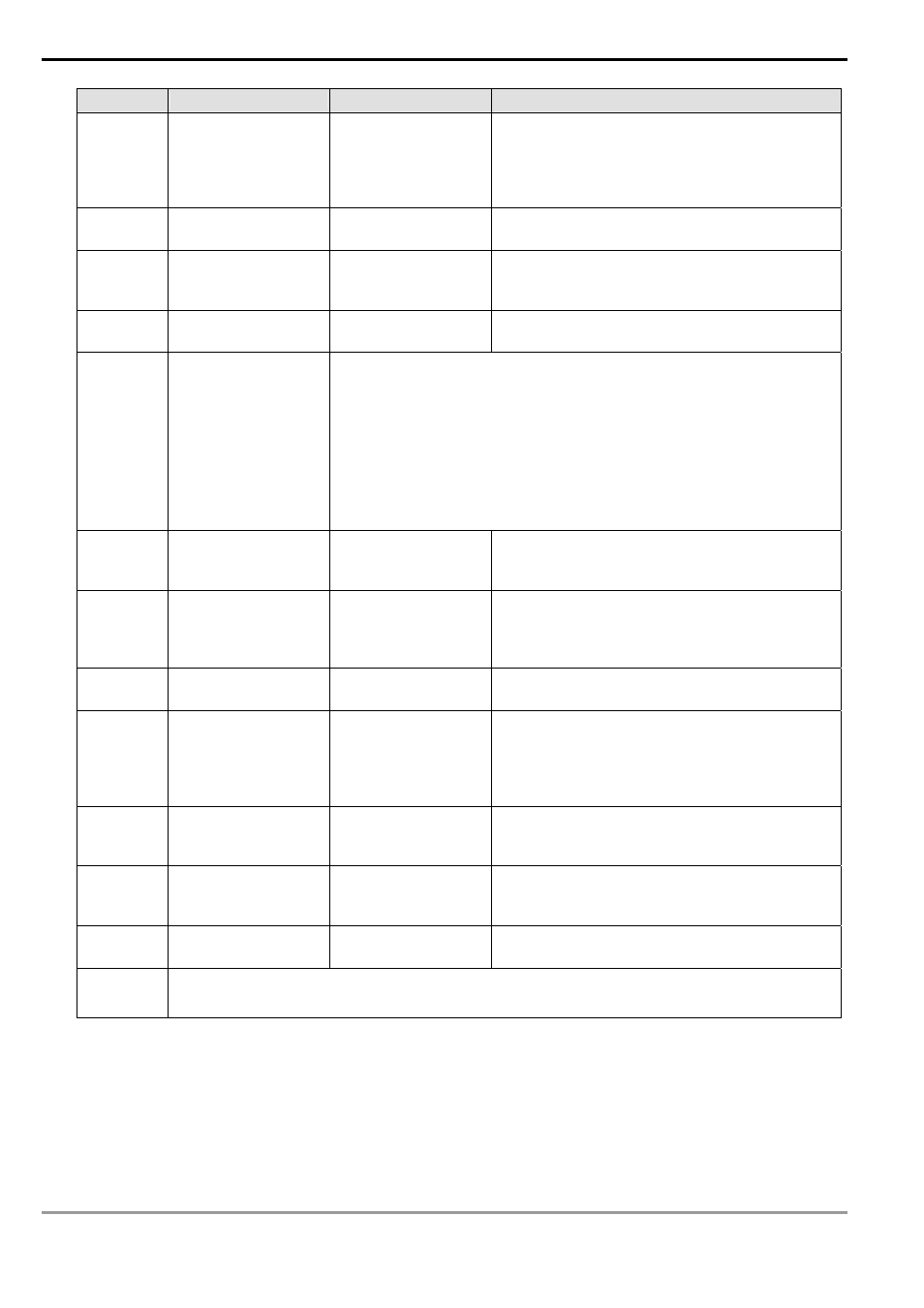
Device No.
Function
Setup Range
Explanation
S
3
:
Sampling time (T
S
)
(unit: 10ms)
1 ~ 2,000
(unit: 10ms)
If T
S
is less than 1 program scan time, PID
instruction will be executed for 1 program scan
time. If T
S
= 0, PID instruction will not be enabled.
The minimum T
S
has to be longer than the
program scan time.
S
3
+1:
Proportional gain (K
P
) 0 ~ 30,000 (%)
The magnified error proportional value between
SV – PV.
S
3
+2:
Integral gain (K
I
)
0 ~ 30,000 (%)
The magnified proportional value of every
sampling time unit × the accumulated value of
the error.
S
3
+3:
Differential gain (K
D
)
-30,000 ~ 30,000 (%)
The magnified proportional value of the varied
error in every samping timme unit.
S
3
+4:
Control direction
(DIR)
0: automatic control
1: forward control (E = SV - PV)
2: inverse control (E = PV - SV)
3: Auto-tuning of parameter exclusively for the temperature control. The
device will automatically become K4 when the auto-tuning is
completed and be filled in with the appropriate parameter K
P
, K
I
and
K
D
(not avaliable in the 32-bit instruction).
4: Exclusively for the adjusted temperature control (not avaliable in the
32-bit instruction).
S
3
+5:
The range that error
value (E) doesn’t
work
0 ~ 32,767
E = the error of SV – PV. When S
3
+5 = K0, the
function will not be enabled, e.g. when S
3
+5 is
set as 5, MV of E between -5 and 5 will be 0.
S
3
+6:
Upper bound of output
value (MV)
-32,768 ~ 32,767
Ex: if S
3
+6 is set as 1,000, the output will be
1,000 when MV is bigger than 1,000. S
3
+6 has
to be bigger or equal S
3
+7; otherwise the upper
bound and lower bound will switch.
S
3
+7:
Lower bound of output
value (MV)
-32,768 ~ 32,767
Ex: if S
3
+7 is set as -1,000, the output will be
-1,000 when MV is smaller than -1,000.
S
3
+8:
Upper bound of
integral value
-32,768~32,767
Ex: if S
3
+8 is set as 1,000, the output will be
1,000 when the integral value is bigger than
1,000 and the integration will stop. S
3
+8 has to
be bigger or equal S
3
+9; otherwier the upper
bound and lower bound will switch.
S
3
+9:
Lower bound of
integral value
-32,768 ~ 32,767
Ex: if S
3
+9 is set as -1,000, the output will be
-1,000 when the integral value is smaller than
-1,000 and the integration will stop.
S
3
+10,11:
Accumulated integral
value
32-bit floating point
The accumulated integral value is only for
reference. You can still clear or modify it (in
32-bit floating point) according to your need.
S
3
+12:
The previous PV
-
The previous PV is only for reference. You can
still modify it according to your need.
S
3
+13:
~
S
3
+19:
For system use only.
5. When parameter setting exceeds its range, the upper bound and lower bound will become the setting value.
However, if the motion direction (DIR) exceeds the range, it will be set to 0.
6. PID instruction can be used in interruption subroutines, step points and CJ instruction.
7. The maximum error of sampling time T
S
= - (1 scan time + 1ms) ~ + (1 scan time). When the error affects the
output, please fix the scan time or execute PID instruction in the interruption subroutine of the timer.
8. PV of PID instruction has to be stable before the execution of PID instruction. If you are to extract the input value