HEIDENHAIN TNC 407 (243 020) Technical Manual User Manual
Page 200
3 Servo positioning of the NC-axes
➀
When operating with feedforward control the set velocity value (the analogue potential for
the drive amplifier) is formed from three components: feedforward control, servo lag,
integral component.
➁
The feedforward control value, which is adjusted to the dynamic characteristics of the
machine by machine parameters, makes it possible to control the loop with a lag distance
which is nearly "0".
➂
Deviations in the actual positional value are compensated as described under "Operation
with lag". The servo follows the pre-compensated curve.
The Kv factor for the feedforward control then comes into play.
➃
If the axes are stopped, the integral factor will also be effective: it results in an offset
correction.
MP1390
Feedforward control in the "Positioning with manual data input", "Program run,
single block" and "Program run, full sequence" modes
Entry:
0 or 1
0 = Operation with feedforward control
1 = Operation with servo lag
MP1391
Feedforward control in the "Manual" and "Handwheel" modes
Entry:
%xxxxx
Bit 0
X axis
0 =
Operation with servo lag
Bit 1
Y axis
1 =
Operation with feedforward control
Bit 2
Z axis
Bit 3
4th axis
Bit 4
5th axis
The feedforward control value is adjusted to the dynamics of the machine by two machine
parameters.
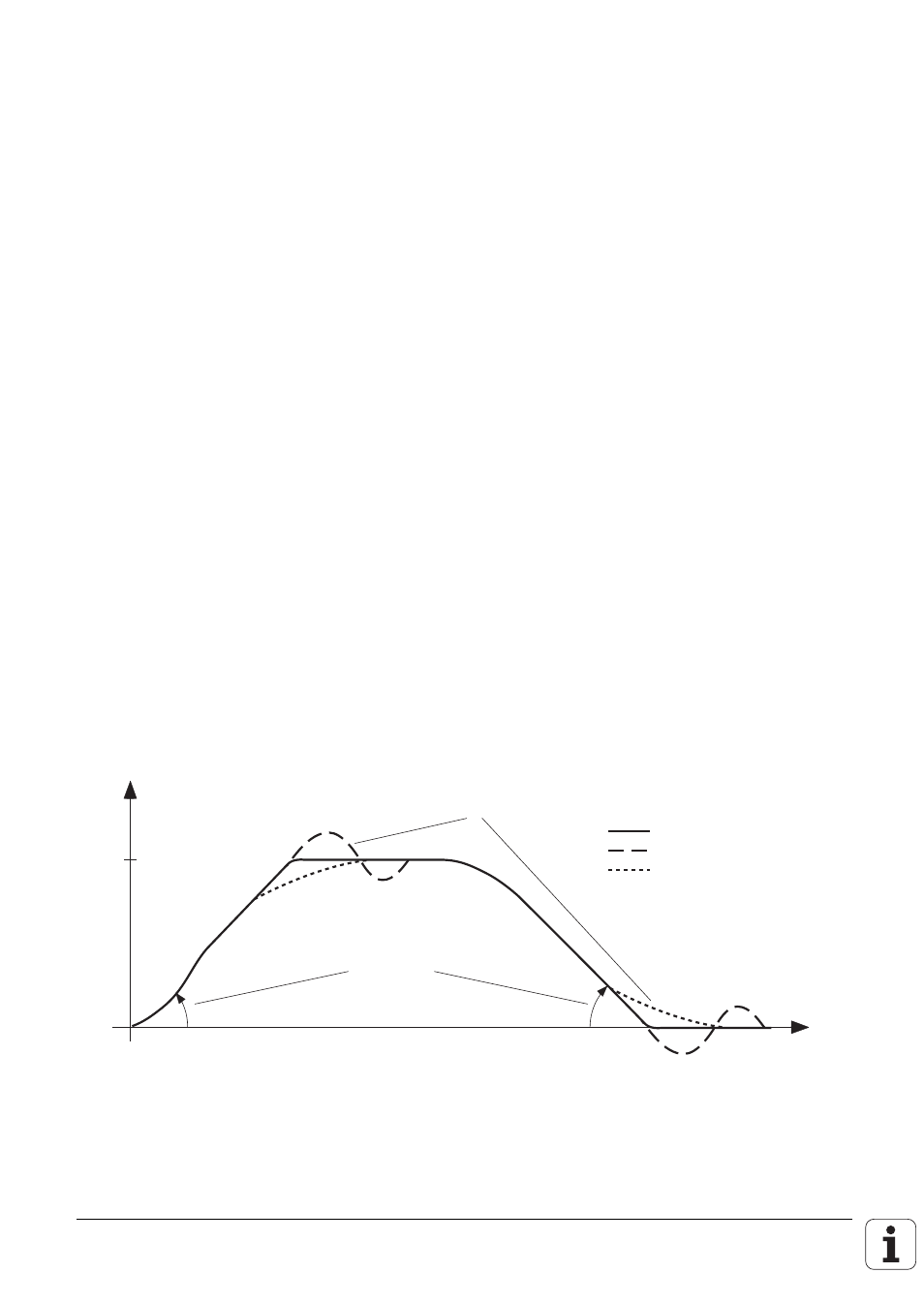
U [V]
t [ms]
MP1060
MP1520
Precontrol
Input value correct
Input value too large
Input value too small
9
The machine parameter MP1060 determines the acceleration (= slope of the precontrolled speed
curve).
MP1520 determines the transient response into the nominal position when accelerating and
decelerating. The greater the value which is entered, the more the system will tend to oscillate.