HEIDENHAIN TNC 407 (243 020) Technical Manual User Manual
Page 149
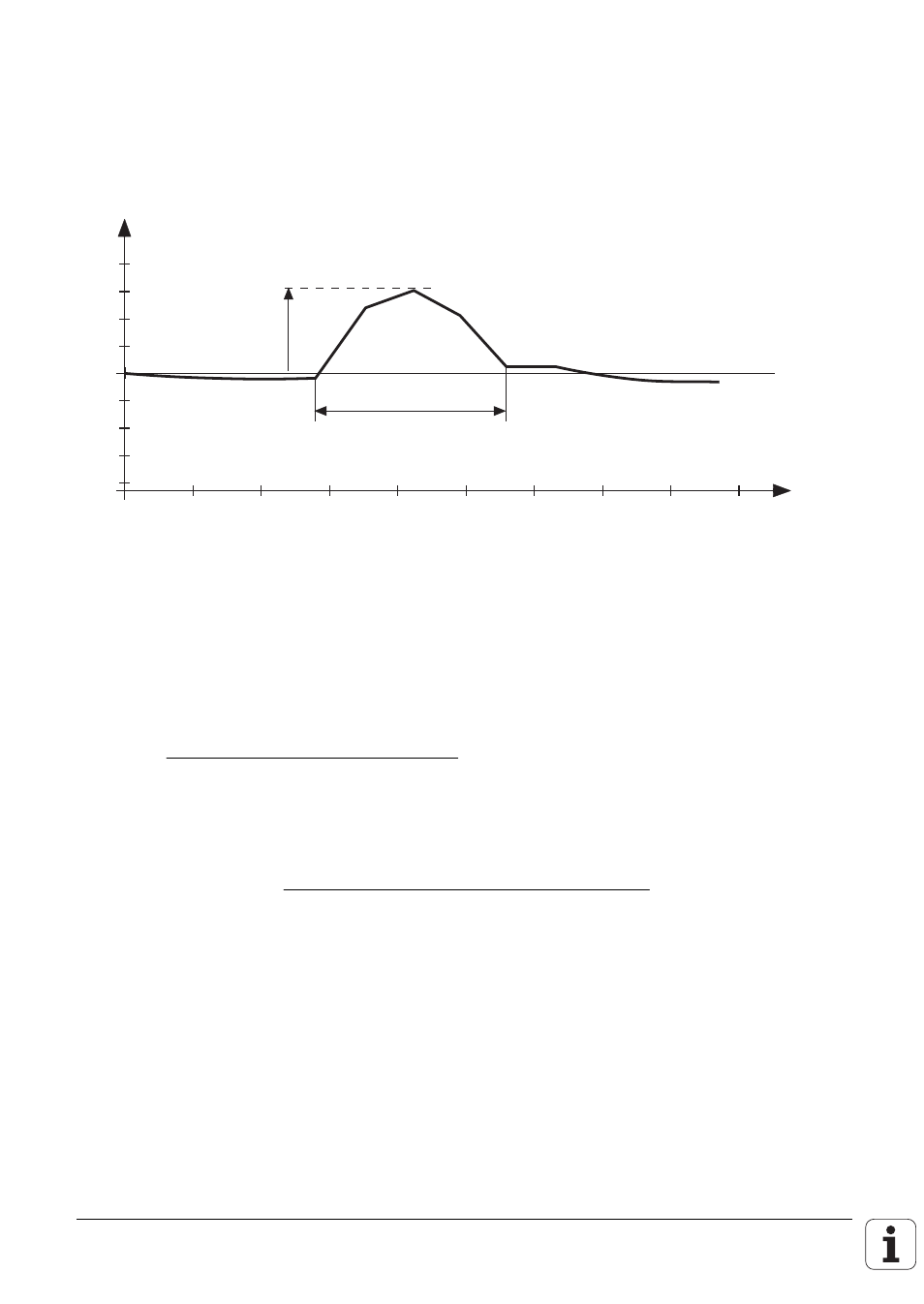
1.6.2 Compensation for reversal errors in circular motion
The stiction in the axis bearings can lead to reversal errors at the quadrant transitions during circular
movements.
Commercially available devices such as the HEIDENHAIN Double Ball Bar system can diagnose
these errors and determine the size and duration of their peaks.
91
°
0
µ
m
3
6
9
12
3
6
9
12
92
°
93
°
94
°
95
°
96
°
97
°
98
°
99
°
Spitzenweite
Peak width
MP711
The TNC can then compensate for these errors. The size of the reversal error which is to be
compensated is entered in machine parameter MP711, and the portion of the peaks to be
compensated per closed loop cycle time is entered in MP712.
The diagram from the DBB system shows the size and duration of a reversal peak.
The entry value for MP712 can be calculated as follows:
–
Duration of the reversal peak
t
Pr
[s] =
Peak width [ ] × 2 × Radius [mm] × 60
360 [ ] × Feed rate [mm / min]
°
°
π
the peak width is [°] indicated in the diagram;
feed rate [mm/min] is the programmed contouring feed rate.
–
Compensation per control loop cycle time (3 ms with TNC 415, 6 ms with TNC 407)
Compensation [mm] =
Reversal peaks [mm] Control loop cycle time [s]
0.5 t
[s]
Pr
⋅
⋅
· 10
-3
The compensation value is entered in MP712.
If the computed values have no effect this is because the machine dynamics are too weak.
MP711
Size of the reversal peaks in circular motion
Entry: -1.0000 to +1.0000 [mm]
MP711.0
X axis
MP711.1
Y axis
MP711.2
Z axis
MP711.3
4th axis
MP711.4
5th axis