Yaskawa MP940 User Manual
Page 72
3.4 User Programs
3-25
3
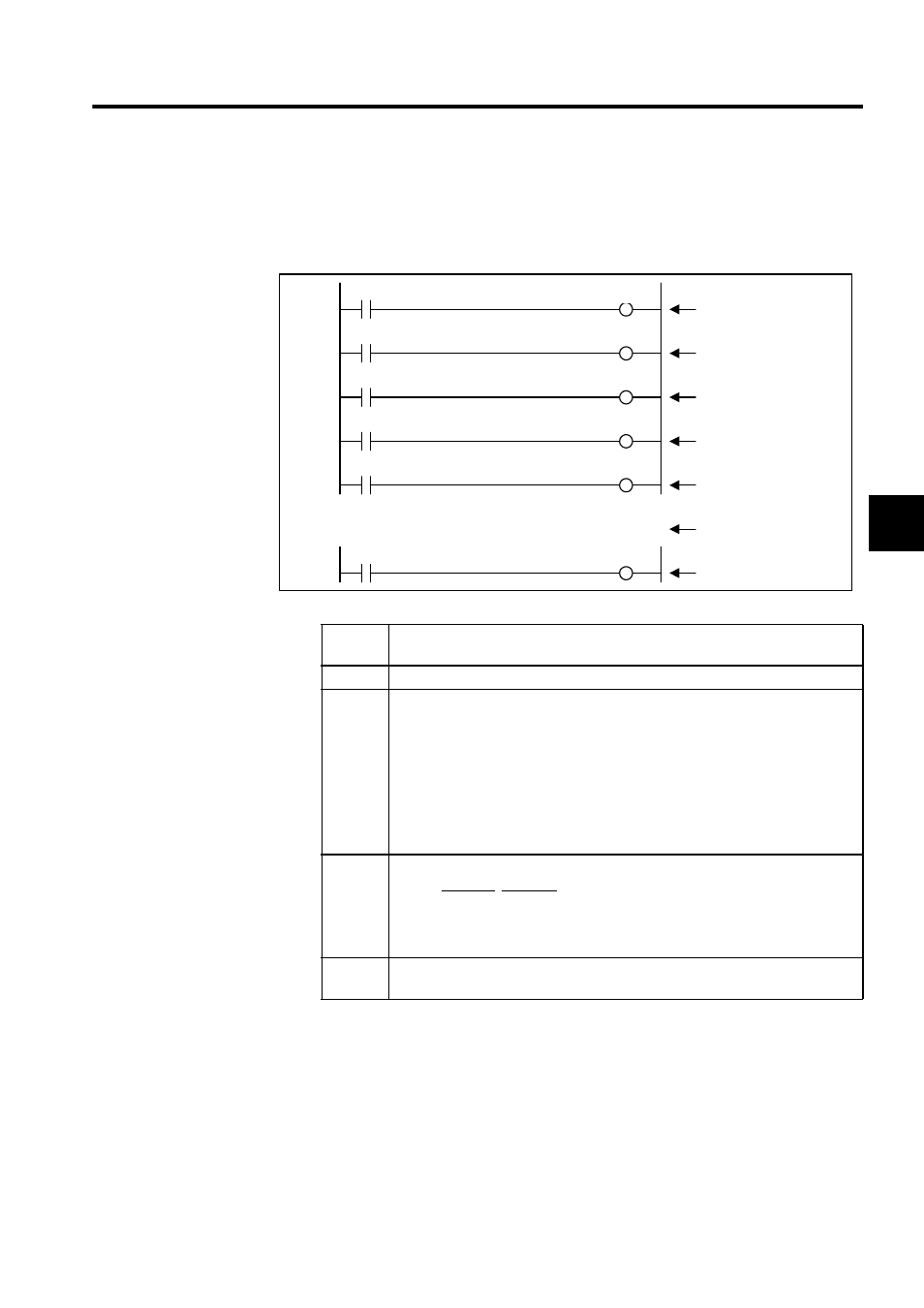
Example of a Ladder Logic Program for Motion Program Control
The minimum ladder logic program required to control a motion program is shown in the
following illustration.
The contents of this ladder logic program are shown in the following table.
When the external input signals (IB00000 to IB00005) connected to the MP940 are input to
DW00001 (second word of MSEE work registers) as motion program control signals using
the ladder logic program shown above, motion program operations such as run, stop and
pause can be performed by the system motion management functions.
Step
Number
Program Content
0
Turns ON or OFF the servo power supply.
2 to 8
The signals connected to the MP940 external input signals are stored as the motion
program control signals.
IW0000 (external input signals)
DW00001 (second word of MSEE work
registers)
• Program operation start
• Program pause
• Program stop request
• Alarm reset
10
Calls motion program MPM001
MSEE MPM001 DA00000
1
2
1. Motion program number
2. MSEE work register address
12
Resets the alarm (bit 6 of OWC000) using the alarm reset signal (IB00005), and
clears the alarm for each axis.
1 0000
IB00007
DB000010
1 0002
IB00000
DB000010
1 0004
IB00001
DB000011
1 0006
IB00002
DB000012
1 0008
IB00005
DB000015
1 0010
MSEE
MPM001
DA00000
1 0012
IB00005
DBC0006
Servo ON/OFF
Program operation start
Program pause
Program stop request
Alarm reset
(motion program)
Motion program call
Axis alarm reset
OBC0010
OBC0006
→