Position control without using motion commands – Yaskawa MP940 User Manual
Page 446
Motion Control
11.3.2 Precautions in Changing to Position Control Mode
11-44
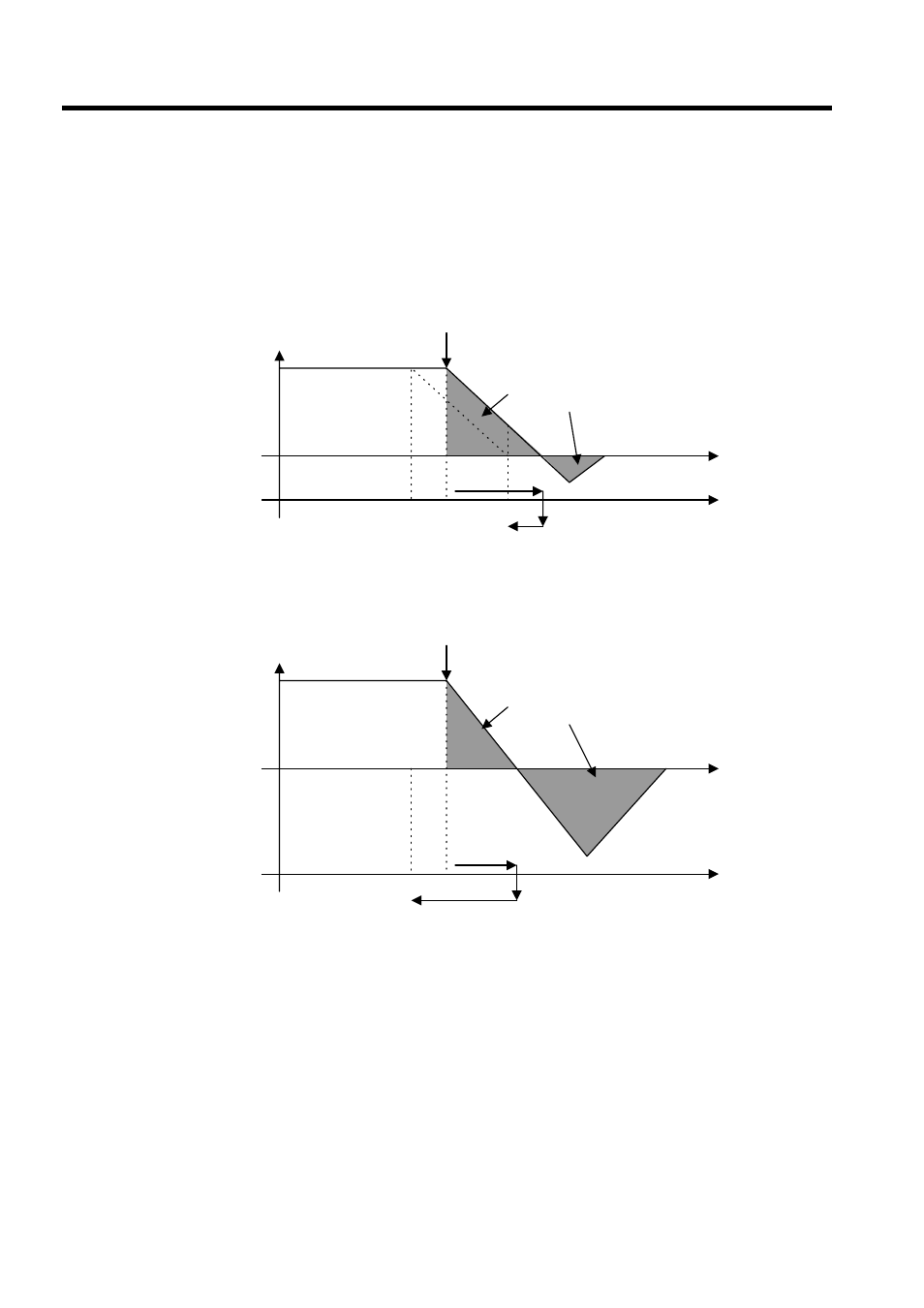
Pattern 2: Present position < Target position, Present position >
Deceleration start position
Deceleration stops after a time set in the deceleration time setting and then reverses the
direction to perform positioning to the target position for a time set in the acceleration time
setting.
In the above illustration, deceleration should have started at point 3. However, after passing
this point, deceleration started from the target position change point and stopped after a set
time. From this stop point, positioning was performed to the target position.
As the target position is located before the present position, the speed is decelerated to a stop
and then, from this stop position, positioning is performed to the target position.
Position Control without Using Motion Commands
In relation to the zero point position, target position, and deceleration start position when
changing to the position control mode or when changing the position reference in the posi-
tion control mode, positioning operations are classified into the following three patterns.
①
②
③
Speed
Target position change point
Travel distance to
target position
1 Present position
2 Target position
Time
Position
①
②
Speed
Target position change point
Travel distance to
target position
1 Present position
2 Target position
Time
Position