Yaskawa MP940 User Manual
Page 508
C-9
C
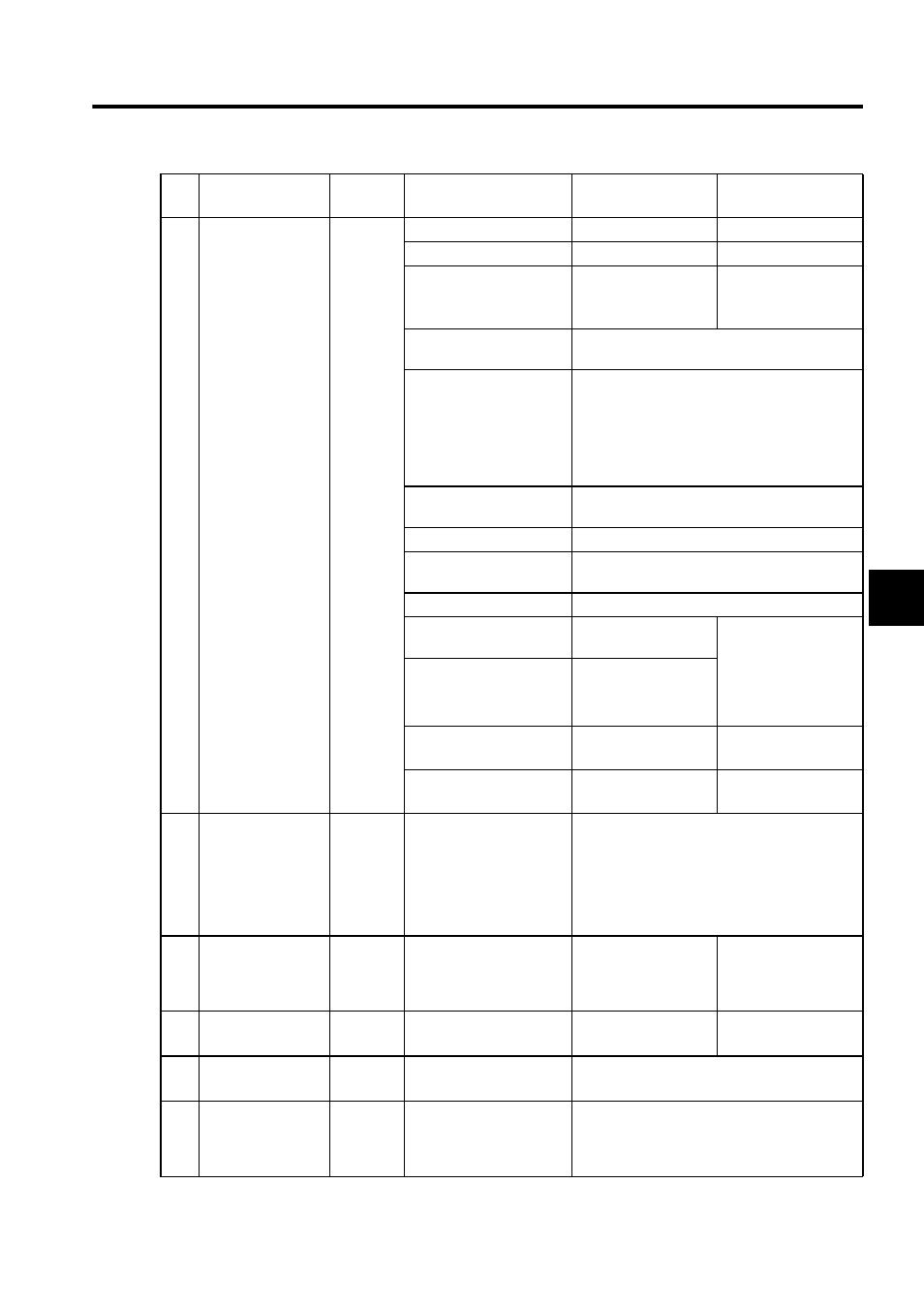
34
Motion Command
Control Flags
(MCMDCTRL)
(Default = 0, all bits
OFF)
OWC021
Bit 0: HOLD
Command Hold
Bit 1: ABORT
Command Abort
Bit 2: DIRECTION
Direction of Movement
0: Forward
1: Reverse
Bit 3: LAGRST
No Primary Lag
(Same as primary lag Time Constant = 0)
Bit 4 to 7: FILTERTYPE
Filter Type Selection
0: No filter.
1: Exponential filter (exponential acceleration/
deceleration)
2: Movement averaging filter (simple S-curved
acceleration/deceleration)
Bit 8: POS_PPI
Position Loop P/PI Switch
0:P
1:PI
Bit 9: POS_IRST
Position Control Integration Reset
Bit 10: NCOMSEL
Speed Compensation (OWC018) during Position
Control
Bit 11: SCMD
SGDH Serial Command Enabled Flag (0, 1)
Bit 12: LMT_L
Reverse Limit Signal
for Zero Point Return
Enabled only when
fixed parameter No. 14,
Additional Function
Selection is set to use
OBC021x (setting
parameter)
Bit 13: LMT_R
Forward Limit Signal
for Zero Point Return
Bit 14: BUF_W
Position Buffer Write
0: No processing
1: Write
Bit 15: BUF_R
Position Buffer Read
0: No processing
1: Read
35
Rapid Traverse
Speed (RV)
OLC022
0 to 2
31
-1
(Default = 3000)
1 = 10
n
reference units/min
(n = Number of digits below decimal)
Pulse unit: 1 = 1,000 pulses/min
mm unit: 1 = 1 mm/min
deg unit: 1 = 1 deg/min
inch unit: 1 = 1 inch/min
37
External
Positioning Travel
Distance
(EXMDIST)
OLC024
-2
31
to 2
31
-1
(Default = 0)
1 = 1 reference unit
1 = 1 pulses for pulse
unit
39
Stopping Distance
(STOPDIST)
OLC026
-2
31
to 2
31
-1
(Default = 0)
1 = 1 reference unit
For motion manage-
ment
41
Step Travel
Distance (STEP)
OLC028
0 to 2
31
-1
(Default = 0)
1 = 1 reference unit
43
Zero Point Return
Final Travel
Distance
(ZRNDIST)
OLC02A
-2
31
to 2
31
-1
(Default = 0)
1 = 1 reference unit
No.
Name
Register
No.
Bit Name
(Setting Range)
Meaning
Remarks