Yaskawa MP940 User Manual
Page 493
B-7
B
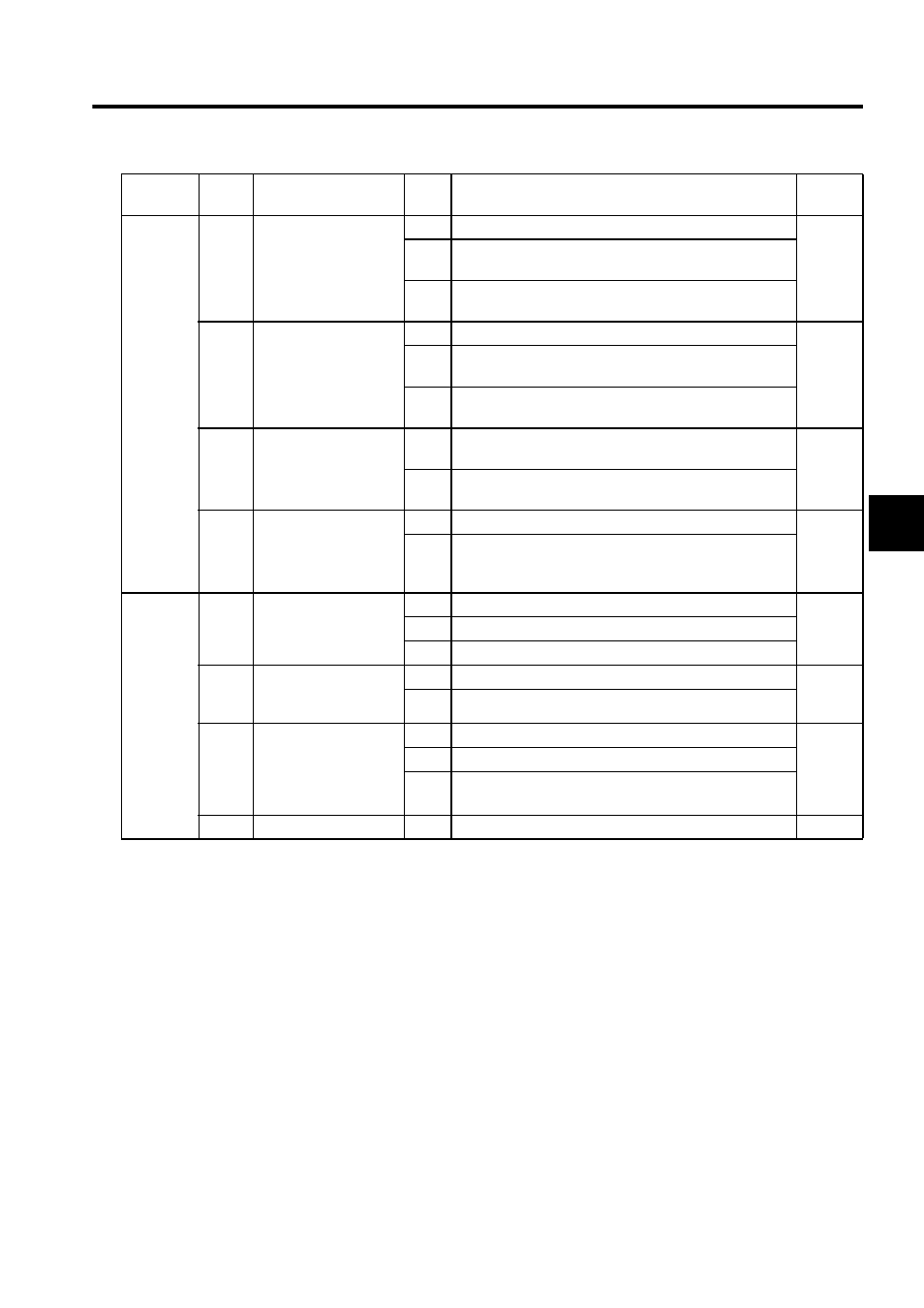
Pn001
Function
Selection
Application
Switches
0
Servo OFF or Alarm
Stop Mode
0
Stops the motor by applying dynamic brake (DB).
0
1
Stops the motor by applying dynamic brake (DB) and then
releases DB.
2
Makes the motor coast to a stop state without using the
dynamic brake (DB).
1
Overtravel Stop Mode
0
Stops the motor using the dynamic brake (DB).
0
1
Sets the torque of Pn406 to the maximum value, decelerates
the motor to a stop, and then sets it to servolock state.
2
Sets the torque of Pn406 to the maximum value, decelerates
the motor to a stop, and then sets it to coasting state.
2
AC/DC Power Input
Selection
0
Not applicable to DC power input: Input AC power supply
through L1, L2, and (L3) terminals.
0
1
Applicable to DC power input: Input DC power supply
through (+)1 and (-) terminals.
3
Warning Code Output
Selection
0
ALO1, ALO2, and ALO3 output only alarm codes.
0
1
ALO1, ALO2, and ALO3 output both alarm codes and
warning codes. While warning codes are output, ALM sig-
nal output remains ON (normal state).
Pn002
Function
Selection
Applica-
tion
Switches
0
Speed Control Option
(T-REF Terminal Allo-
cation)
0
None
0
1
Uses T-REF as an external torque limit input.
2
Uses T-REF as a torque feed-forward input.
1
Torque Control Option
(V-REF Terminal Allo-
cation)
0
None
0
1
Uses V-REF as an external speed limit input.
2
Absolute Encoder
Usage
0
Uses absolute encoder as an absolute encoder.
0
1
Uses absolute encoder as an incremental encoder.
2
Uses absolute encoder as an absolute encoder.
Uses multi-turn limit.
3
Reserved constant
0
-
0
Parameter
Digit
Place
Name
Setting
Contents
Default
Setting