Yaskawa MP940 User Manual
Page 161
MP940 Functions
4.7.3 MP940 Servo Control Function
4-68
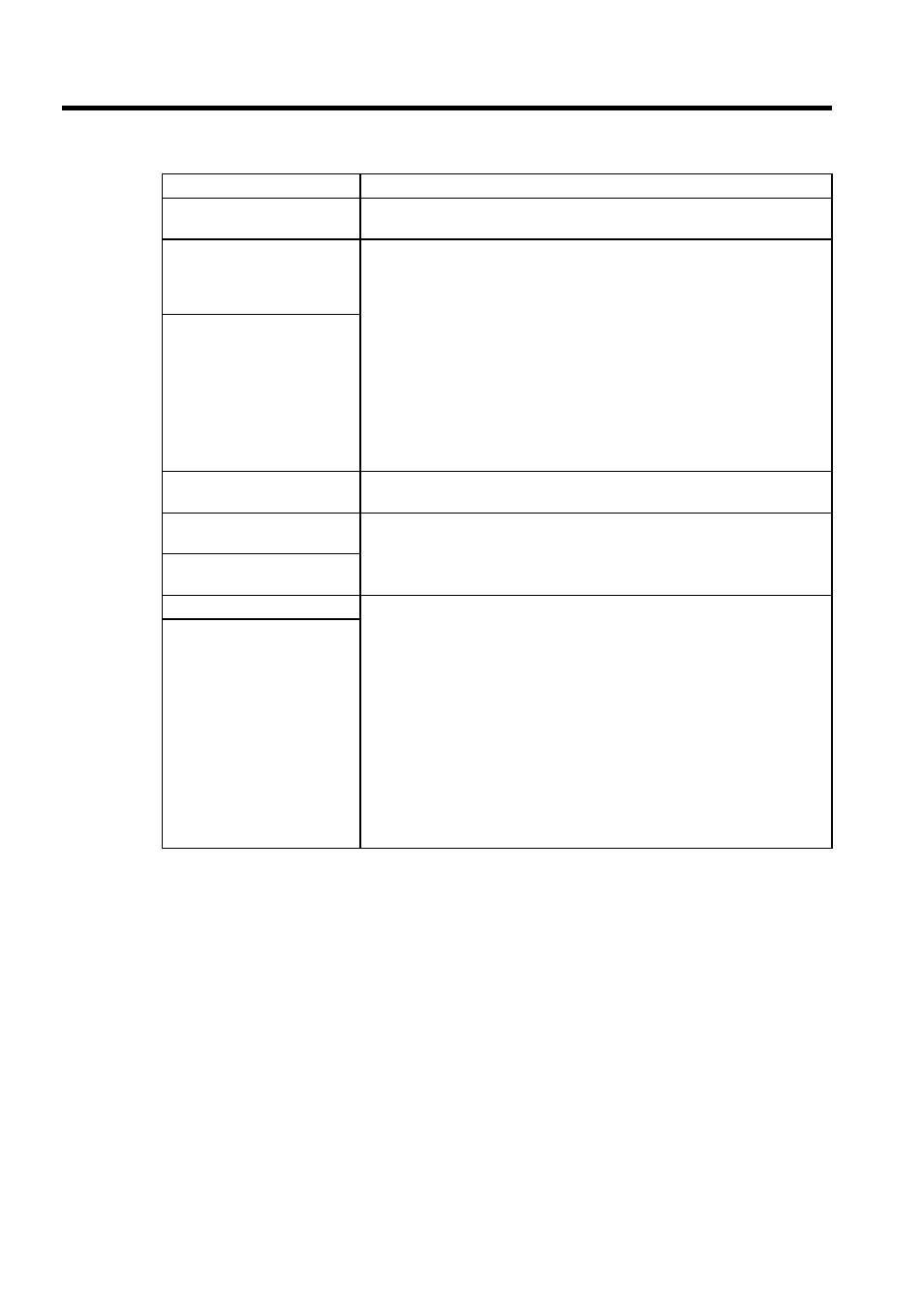
Feed forward gain
Can be changed using the Feed Forward Gain motion setting parameter
(OWC010).
Speed loop gain
1. Set the following parameters of the SGDH SERVOPACK beforehand.
Pn100: Speed Loop Gain
Pn101: Speed Loop Integral Time Constant
Pn104: No. 2 Speed Loop Gain
Pn105: No. 2 Speed Loop Integral Time Constant
2. Switch using the Gain Switch motion setting parameter (OBC0012) in the Run
Commands (OWC001).
Note: To change parameters of the SGDH SERVO-
PACK Pn100, Pn101, Pn104, and Pn105, use
SGDH SERVOPACK command communica-
tions.
Speed loop integral time
constant
Position loop integral time
constant
Can be changed using the Position Control Integral Time Constant motion setting
parameter (OWC035).
Soft start acceleration time
constant
Can be changed using the following SGDH SERVOPACK command communica-
tions: parameter of the SGDH SERVOPACK Pn305 “Soft Start Acceleration Time
Constant” and parameter Pn306 “Soft Start Deceleration Time Constant”.
Soft start deceleration time
constant
Forward torque limit
There are two methods for switching the torque limit.
1. Control Using the Torque Limit Command from the MP940
Set the limit value using the Forward Torque Limit Setting motion setting
parameter (OWC002).
2. Using Parameters of the SGDH SERVOPACK
Change the parameters using SGDH SERVOPACK command
communications.
Pn402: Forward Torque Limit
Pn403: External Input Forward Torque Limit
Pn405: Reverse Torque Limit
Pn406: External Input Reverse Torque Limit
Switch between forward and reverse using the Forward External Torque Limit
Input (OBC0013) and Reverse External Torque Limit Input (OBC0014) settings in
the Servodriver Operation Commands motion setting parameter (OWC001).
Reverse torque limit
Parameter
Method of Change