Yaskawa MP940 User Manual
Page 260
Parameters
6.3.2 Motion Setting Parameter Details
6-20
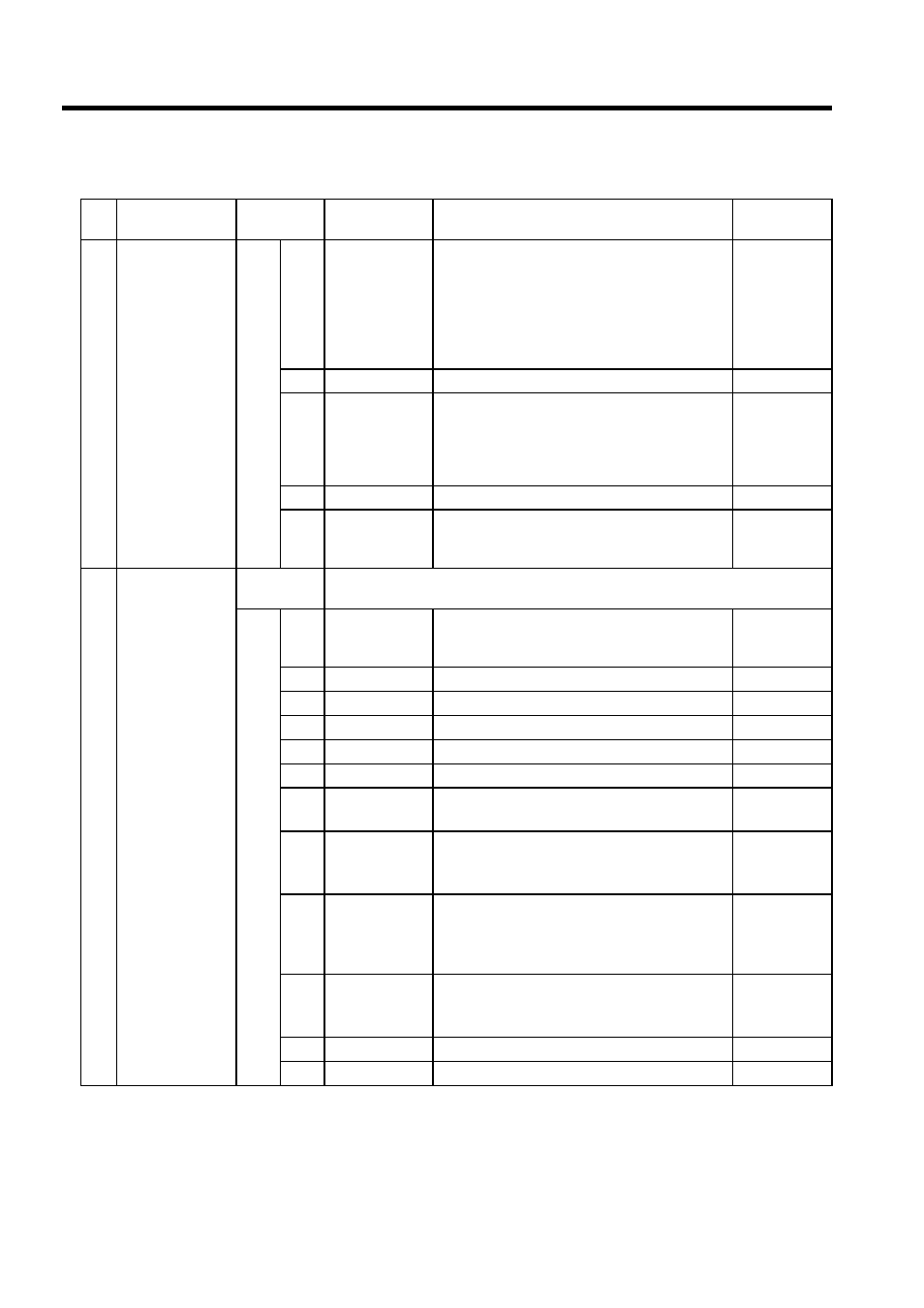
1
RUN Mode
Settings
(RUNMOD),
continued
Bit
11
Feed Forward
Compensation
during Control
Mode Switching
When the feed forward value (OWC011) is set to
other than 0, the speed reference value output is
increased momentary by the feed forward value
when switching to control mode even when using
the same speed command (e.g., speed to position).
0: Feed forward compensation OFF
1: Feed forward compensation ON
0
12
Not used.
Set to “0."
0
13
DI Latch
Request (DIN-
TREQ)
The current position the instant the DI latch signal
turns ON is indicated in ILC006: Machine Coordi-
nate System Latch Position when this bit is ON. Bit
11 of IWC000: DI Latch Completed Signal will
turn ON when DI latch has been completed.
0
14
Not used.
---
0
15
Phase Control
Integration
Reset (IRESET)
The PI control integration is reset if this bit turns
ON in Phase Control Mode.
0
2
RUN Command
Settings
(SVRUNCMD)
OWC001
Set the output signal from Motion Module to the SGDH SERVOPACK as well as the
RUN mode required for motion control. The bit configuration is described below.
Bit
0
RUN Servo ON
(DO0)
This parameter is used as the servo ON signal for
the driver. “1” is output from DO0 if this bit is set
to “1” when SVCRDY (IBC0007) is ON.
0
1
P-CON
Speed loop P/PI switching
0
2
G-SEL
Gain switching
0
3
P-CL
Positive external torque control input
0
4
N-CL
Negative external torque control input
0
5
ZCLAMP
Zero clamp input
0
6
PHSCANSEL
Phase control mode synchronous scan selection
0: H scan 1: S scan
0
7
PSCANSEL
Position control mode
Parameter synchronous scan selection
0: H scan 1: S scan
1
8
ACCSEL
Position control mode
Select whether to use acceleration and deceleration
function
0: ON; 1: OFF
0
9
SEGSEL
Position control mode
Segment division
0: ON; 1: OFF
0
10
Not used.
---
11
Not used.
---
No.
Name
Register
Number
Bit Name
Description
Default