Sgdh – Yaskawa MP940 User Manual
Page 421
11.2 Control Modes
11-19
11
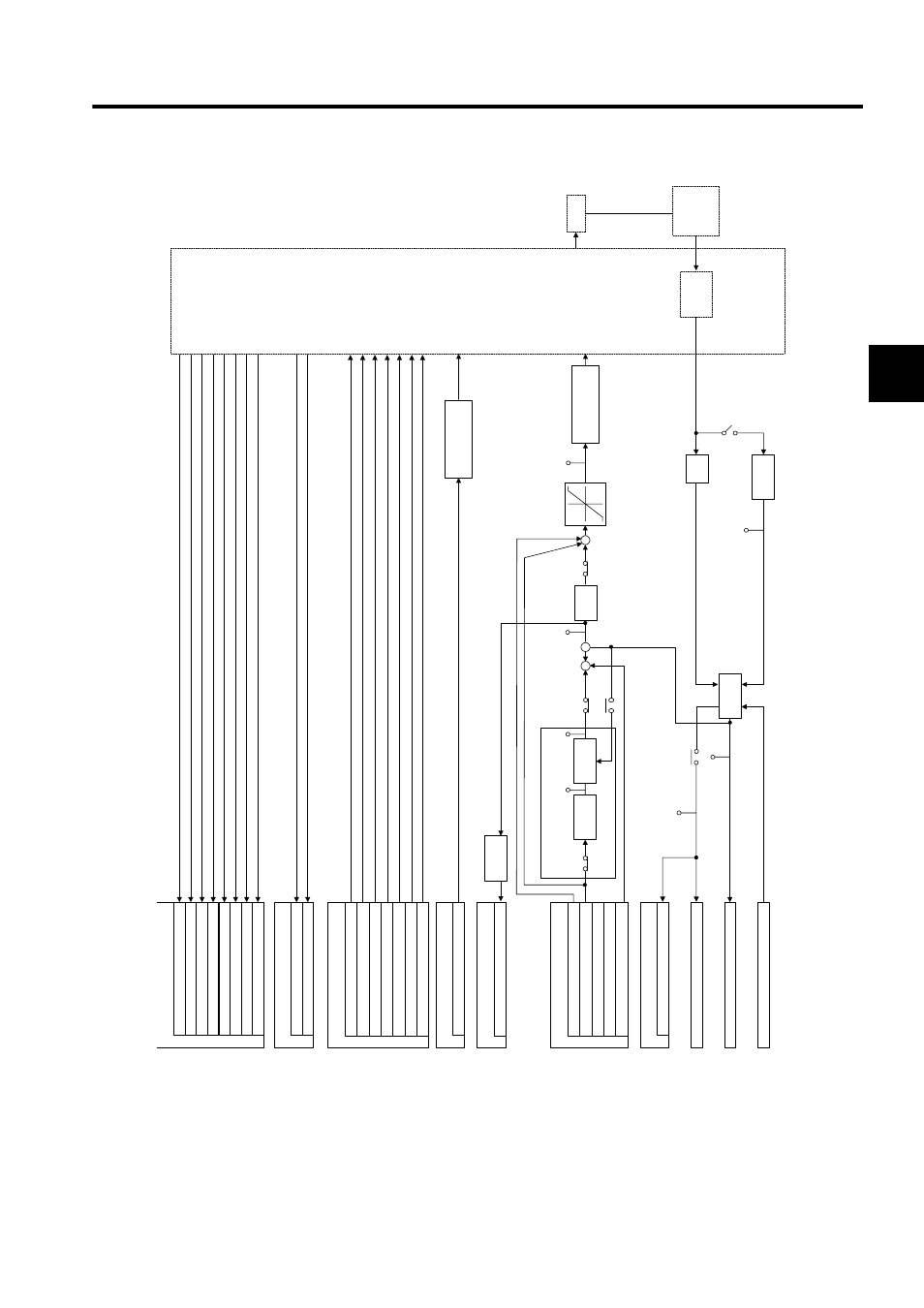
Fig 11.10 MP940 SVA Phase Control Mode Block Diagram
SGDH
IL
C
006
(L
PO
S)
ILC00
8
(APO
S)
ILC0
10
(ABSREV)
ILC0
12
(I
PUL
SE)
位
置制御
モード
用パラ
メータ
ILC0
0A
(PERR)
-
IW
C0
0C
(SPDREF
)
+
+
OW
C
004
(N
LI
M
P
)
0
OW
C0
05
(N
LI
M
N
)
+
+
+
IL
C
0
04
(P
H
G
D
IF
)
OBC
000
5
(PHT
E
S
T
)
IB
C0
00
7
(P
HRE
F
O
F
F
)
IL
C
0
02
(CPO
S)
+
OB
C0
00
5
(P
HT
EST
)
OB
C000
5
(PHTEST
)
S
er
vod
rive
st
a
tus
(
IW
C
001
)
SIO
: Ge
ner
al
in
pu
t
--
DI
0
P
E
C: D
ec
e
lerati
on L
S
--DI1
P
-O
T: Po
si
tiv
e O
T
--DI2
N-
O
T:
Negati
ve
OT
-
-DI3
E
X
T1: E
xternal
inp
ut s
ign
al 1
--DI4
E
X
T2: E
xternal
inp
ut s
ign
al 2
--DI5
E
X
T3: E
xternal
inp
ut s
ign
al 3
--DI6
A
LM: S
erv
o
al
ar
m
--DI7
An
al
og
m
oni
to
r
S
pee
d mon
itor
(
IW
C
00D)
Tor
que
moni
tor
(
IWC0
0E)
Sp
ee
d
m
on
ito
r
To
rq
ue
mo
nit
o
r
RUN c
om
m
and
(
O
W
C
001)
R
un
(
RUN)
-
--DO
0
S
pee
d lo
op P
/PI c
on
tr
o
l
---DO
1
Ga
in se
le
ct
io
n
---
DO
2
E
xt
e
rnal pos
itive
to
rqu
e
limit
input
--DO
3
E
xt
e
rnal negat
ive
to
rqu
e
limit
input
--
D
O
4
Zero c
la
m
p i
npu
t
---
DO
5
Sen
sor
ON
(S
EN
)
To
rq
ue
limit settin
g
P
o
sit
iv
e
t
o
rque l
im
it set
ting
(O
W
C
002)
Tor
que r
ef
er
enc
e
conv
er
si
on
To
rq
ue
r
e
fe
re
nc
e
(t
or
qu
e l
im
it)
R
U
N
s
ta
tus (
IW
C
00
0)
De
vi
atio
n er
ror
(
IBC00
00)
D
evi
at
io
n
ju
dgem
ent
Pa
ra
mete
rs
for
po
si
tion
co
ntr
ol m
ode
S
peed c
ompens
at
ion
set
ting (
O
W
C
0
18)
S
peed re
fe
renc
e s
e
tt
in
g (O
LC015)
P
roport
ional gain
set
ting (
O
W
C
01
9)
In
te
g
ral t
im
e
s
e
tt
ing (O
W
C
01A
)
P
hase com
pensat
io
n
set
ting (O
LC016)
Ph
ase
r
efe
re
nce
ge
ne
ra
tion
com
put
ati
on
P
res
en
t po
si
tion
in
cr
em
ent
com
-
pu
tat
ion
Pr
esent
posit
ion
com
p
ut
a-
PI
c
o
mpu-
ta
tio
n
In
te
gr
al is r
eset
w
hen
IR
ES
ET si
g-
na
l tu
rn
s ON
o
r
whe
n T
i t
u
rn
s 0.
Sp
e
ed
limite
r
S
pe
ed r
efe
re
nce
co
nv
er
si
on
S
p
ee
d r
ef
er
en
ce
Mo
to
r
R
U
N
s
ta
tus (
IW
C
00
0)
DI
lat
ch c
omplet
ed s
ignal
(I
B
C
000B
)
M
a
chine coordinat
e
lat
ch posit
ion (I
LC
008)
M
a
chine
coordinat
e f
eedback
(I
LC006)
Z
er
o p
oin
t of
fse
t (
O
L
C
006)
Ext
e
rn
al
la
tc
h si
gnal
Pres
ent
posit
ion
com
p
ut
a-
M
u
ltipli
-
cat
ion
Rec
eiv
ing
absolut
e pos
i-
tion dat
a
A
b
solu
te
en
co
der
Div
ider
Abs
o
lu
te
/
increm
en-
tal encoder