9 zero point setting (zset), Caution, Ladder logic program example – Yaskawa MP940 User Manual
Page 483
11.4 Position Control Using Motion Commands
11-81
11
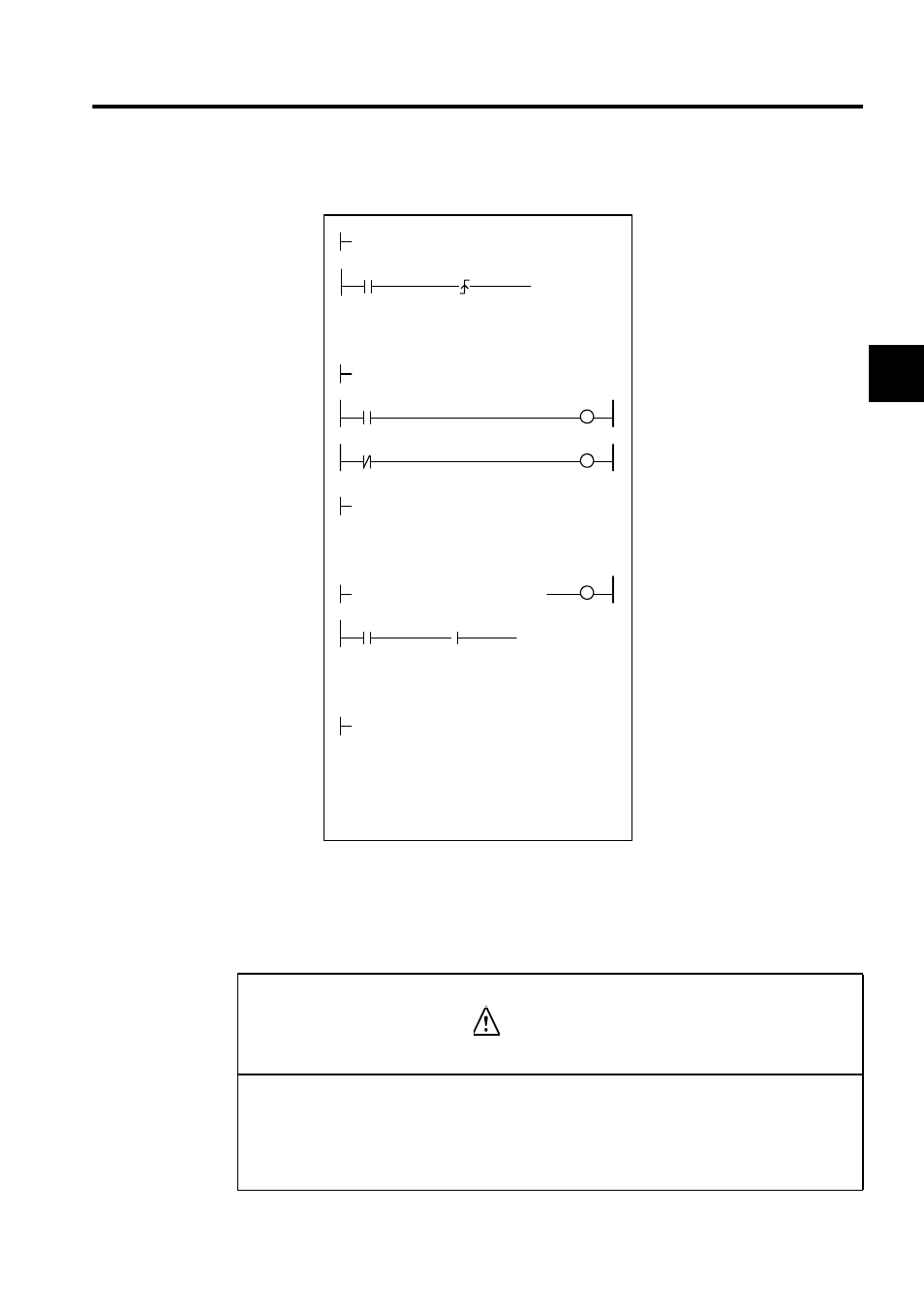
Ladder Logic Program Example
The example in the above illustration has been greatly simplified. In actual operation, each
register can be controlled from the user program.
11.4.9 Zero Point Setting (ZSET)
IFON
H0101
RUNMOD
⇒
OWC000
0000002000
STEP
⇒
OLC028
RUN
OBC0010
SB000004
DIRECTION
OBC0212
SB000004
8
MCMDCODE
⇒
OWC020
IEND
DB000010
MCMDRCOD
IWC014 =00008
POSCOMP
IBC000B
DB000010
IFON
0
MCMDCODE
⇒
OWC020
IEND
DEND
DB000000
RUNPB
IB00304
Set the position control mode to ON.
STEP travel distance (STEP)
(2,000 pulses)
Detection at the rising edge
Driver operation command (RUN)
Execute fixed length feed (STEP) as the
motion command.
When IB00304 turns ON, STEP feed
starts, and the axis travels only the
STEP travel distance in the forward
direction.
When travel is completed, the IBC000D
positioning completed signal turns ON.
Once travel has been completed, the
motion command is cleared (= NOP
command) to prepare for the next com-
mand.
• The zero point return setting (ZSET) command is used to set the machine coordinate system
zero point. Therefore, if the ZSET setting position is incorrect, the movement for subsequent
operations will differ from the actual position. Before executing operations, be sure to check that
the correct machine coordinate system zero point has been set.
Failure to observe this caution may result in damage to equipment, serious personal injury, or even death.
Caution