Zero point return method, Dec1 + phase-c pulse – Yaskawa MP940 User Manual
Page 464
Motion Control
11.4.4 Zero Point Return (ZRET)
11-62
Zero Point Return Method
The following methods are available with the zero point return (ZRET) motion command.
• With a limit switch (deceleration limit switch) and a zero point return limit signal, a user program
must be created to connect the other external DI signal to the next motion setting parameters.
∗
Whether a DI signal or OBC001F is used as the limit switch signal is set
in the bit 2 in motion fixed parameter No. 14 (Additional Function Selec-
tions).
• A limit switch (deceleration limit switch) signal's polarity can be reversed using the setting of bit 10
(Deceleration Limit Switch Inversion Selection) in motion fixed parameter No. 17 (Motion Con-
troller Function Selection Flags). The default is 0 (do not reverse).
• Refer to 11.2.5 Zero Point Return Mode for details.
• The zero point return method is set in b0 to b7 of fixed parameter No. 31 (Zero Point Return
Method).
Details on each method are given next.
DEC1 + Phase-C Pulse
This method is used to perform zero point return using a limit switch (deceleration limit
switch) and a zero point signal (Phase-C pulse) by rapid traverse using linear acceleration/
deceleration (with a dog width).
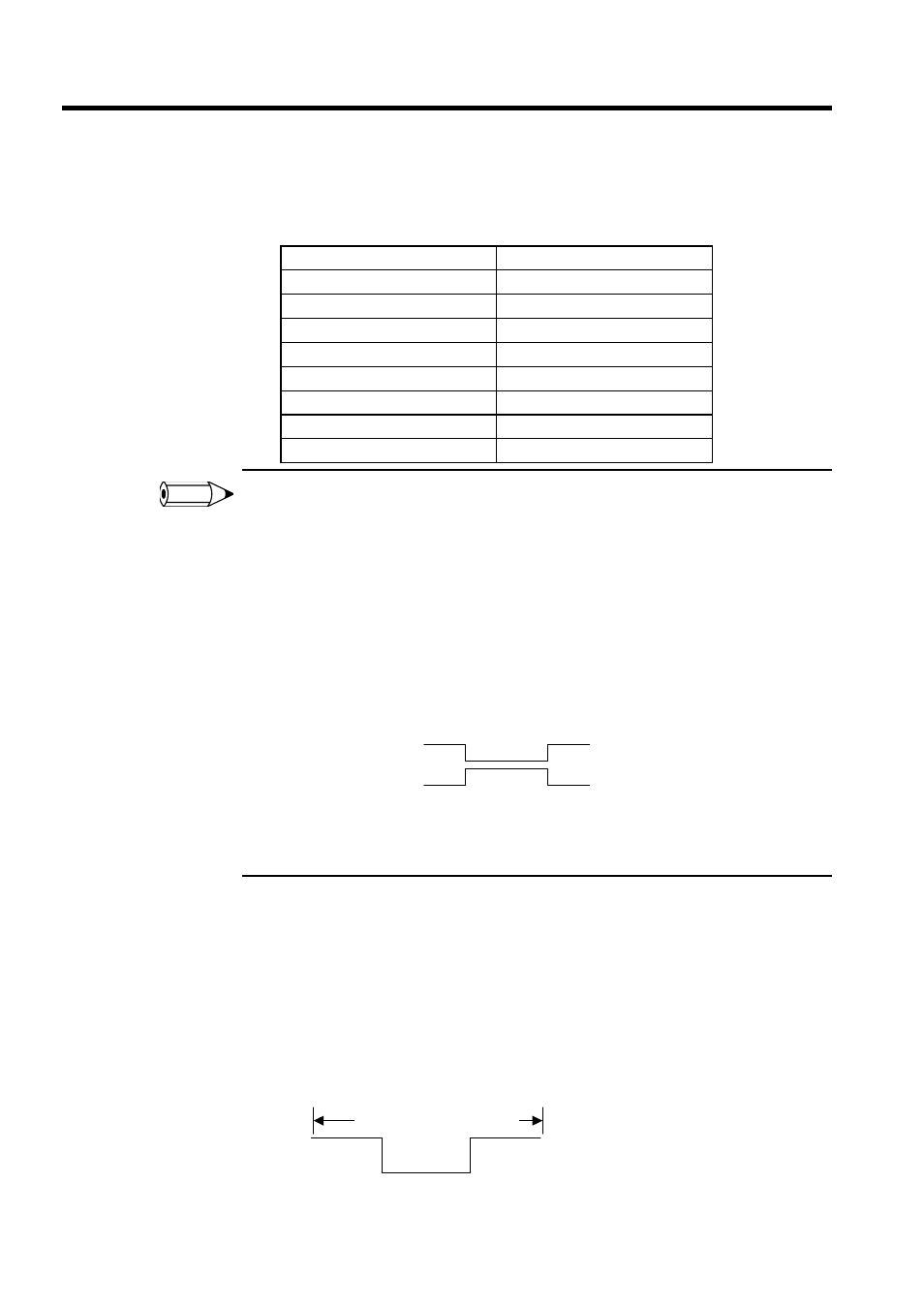
The limit switch is used with a mechanical configuration such as the one shown in the fol-
lowing illustration.
Zero Point Return Method
Fixed Parameter 31 Setting
DEC1 + Phase-C pulse
0
DEC2 + Phase-C pulse
6
DEC1 + LMT + Phase-C pulse
7
Phase-C pulse
3
DEC1 + ZERO signal
2
DEC2 + ZERO signal
4
DEC1 + LMT + ZERO signal
5
Zero signal
1
INFO
• Limit Switch Signal*:
OBC001F
• Reverse Limit Signal for Zero Point Return:
OBC021C
• Forward Limit Signal for Zero Point Return:
OBC021D
Deceleration
limit switch
Deceleration
limit switch
1:Reverse
0:Do not reverse
NC contact
NO contact
High
Low
Deceleration
limit switch
Machine total operating area