Yaskawa MP940 User Manual
Page 264
Parameters
6.3.2 Motion Setting Parameter Details
6-24
No.
Name
Register
Number
Bit Name
Description
Default
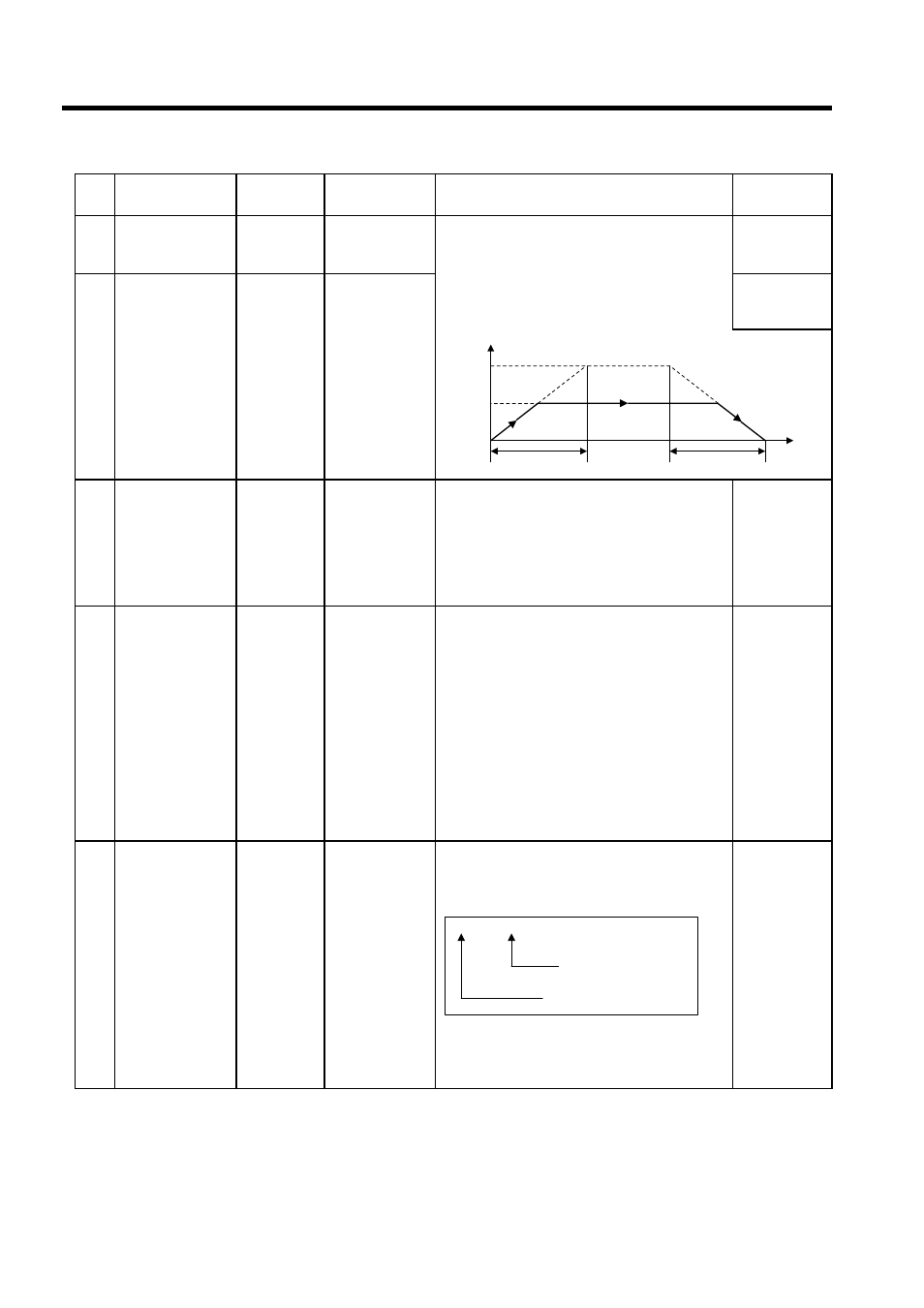
13
Linear
Acceleration Time
Constant (NACC)
OWC00C
0 to 32767
Set the linear acceleration/deceleration time for
Speed, Position Control, and Zero Point Return
Modes.
Unit: ms
Set acceleration time from 0% to 100% (rated
motor speed).
0
14
Linear
Deceleration
Time Constant
(NDEC)
OWC00D
0 to 32767
0
15
Positioning
Completed
Range Setting
(PEXT)
OWC00E
0 to 65535
This parameter is used in Position Control and
Zero Point Return Modes.
Set the range before bit 13 of IWC000: Positioning
Completed Signal or bit 15 of IWC000: Zero Point
Return Completed Signal turns ON.
Unit: Reference unit
Refer to the explanation on IWC000D.
10
16
Error Count
Alarm Detection
Setting (EOV)
OWC00F
0 to 65535
This parameter is used in Position, Phase Control,
and Zero Point Return Modes.
Set the limit for outputting bit 0 of IWC000: Error
Counter Over. Outside this range, the Error
Counter Over will turn ON and this value will be
used as the error count in position control.
Error Counter Over will not be detected if this
parameter is set to “0."
The deviation error is detected using the value of
EOV_MULTI
of the deviation error detection
value setting (OWC00F) using the deviation error
detection coefficient (EOV_MULTI) (Fixed
parameter No. 14, bits 12 to 15).
65535
17
Position Loop
Gain Setting (Kp)
OWC010
0 to 32767
Set the position loop gain in the servo system.
Position loop gain is needed to set response perfor-
mance for the servo system.
The following are setting guidelines.
Set an appropriate value for the machine rigidity,
inertia, and type of servomotor.
• Setting range: 1 to 32767 [0.1/S]
300
(30.0)
NR
(
100%)
NREF
0
NACC
NDEC
Speed
reference
Time
(t)
Speed
(%)
2
×
40 to 250
Excellent response
(Watch for hunting.)
Ordinary response
to