3 motion monitoring parameter details – Yaskawa MP940 User Manual
Page 277
6.3 SVA Parameter Details
6-37
6
6.3.3 Motion Monitoring Parameter Details
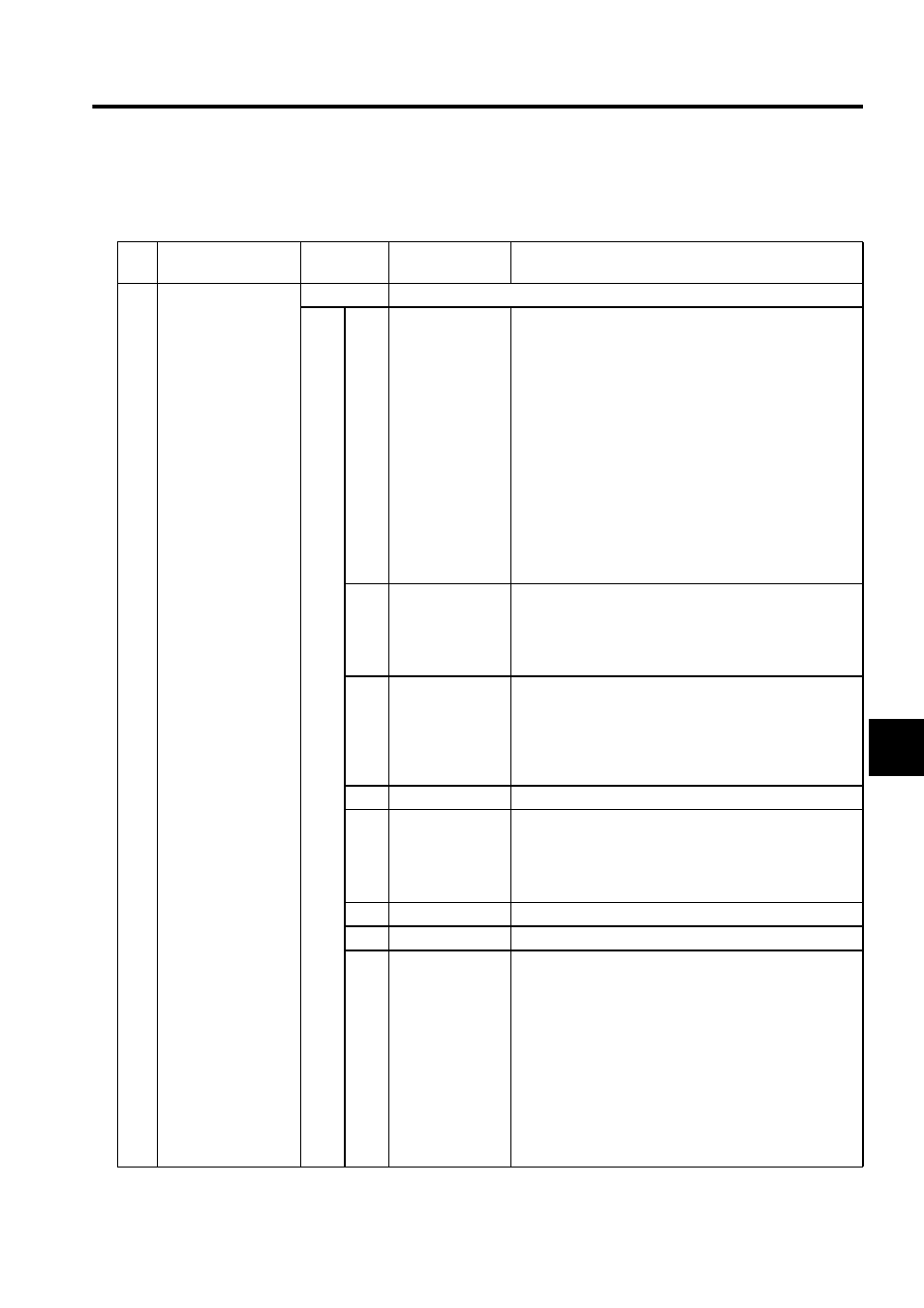
Table 6.3 Motion Monitor Parameter Details
No.
Name
Register
No.
Bit Name
Description
1
RUN Status
(RUNSTS)
IWC000
Indicate MP940 Module operating status. The bit configuration is described below.
Bit
0
Error Counter Over
(EOVER)
This bit turns ON when the ILC0j0A: Position Error exceeds
the OWC00F: Error Counter Alarm Detection Setting.
Note: Because control will not be interrupted, create a user
program that will monitor this bit and perform other
processing if application-specific processing, such as
emergency stop, is required.
The following items are potential causes for error alarms.
1. OWC00F: Error Count Alarm Detection Setting is set too
low.
2. The Servomotor is not operating.
3. Operation according to set references failed because the
load in the machine system is too heavy.
This parameter is valid in Position Control Mode, Zero Point
Return Mode, and Phase Control Mode.
1
Motion Setting
Parameter Setting
Error (PRMERR)
This bit turns ON when one or more of the motion setting
parameters (OWC000 to OWC03F) is set outside the setting
range. In this case, the most recent motion setting parameter
number that caused the setting range alarm will be indicated
at IWC00F: Parameter Number Out of Range.
2
Motion Fixed
Parameter Setting
Error (FPRMERR)
This bit turns ON when a motion fixed parameter is set out-
side the setting range. In this case, the most recent motion
setting parameter number that caused the setting range alarm
plus 100 will be indicated at IWC00F: Parameter Number
Out of Range. This parameter will turn OFF automatically if
an ordinary motion fixed parameter is set from the CP-717.
3
Not used.
---
4
Commulative
Number of Rota-
tions Received
Error (PGER)
The absolute position is sent and received over serial lines
when the power supply is turned ON and bit 10 of OW0000:
Absolute Position Read Request turns ON when an absolute
encoder is used. This Parameter turns ON if a receive error
occurs.
5
Not used
---
6
Not used
---
7
Motion Controller
RUN Ready
(SVCRDY)
This parameter turns ON when RUN preparations for the
Motion Module have been completed. The following may be
reason why RUN preparations are not completed.
1. Major damage has occurred.
2. Axis that is not used was selected (motion fixed
parameter setting).
3. Motion fixed parameter setting error.
4. Cumulative no. of rotations received error.
5. Motion fixed parameters are being changed.
6. Absolute position is being read from the absolute
encoder.