Yaskawa MP940 User Manual
Page 280
Parameters
6.3.3 Motion Monitoring Parameter Details
6-40
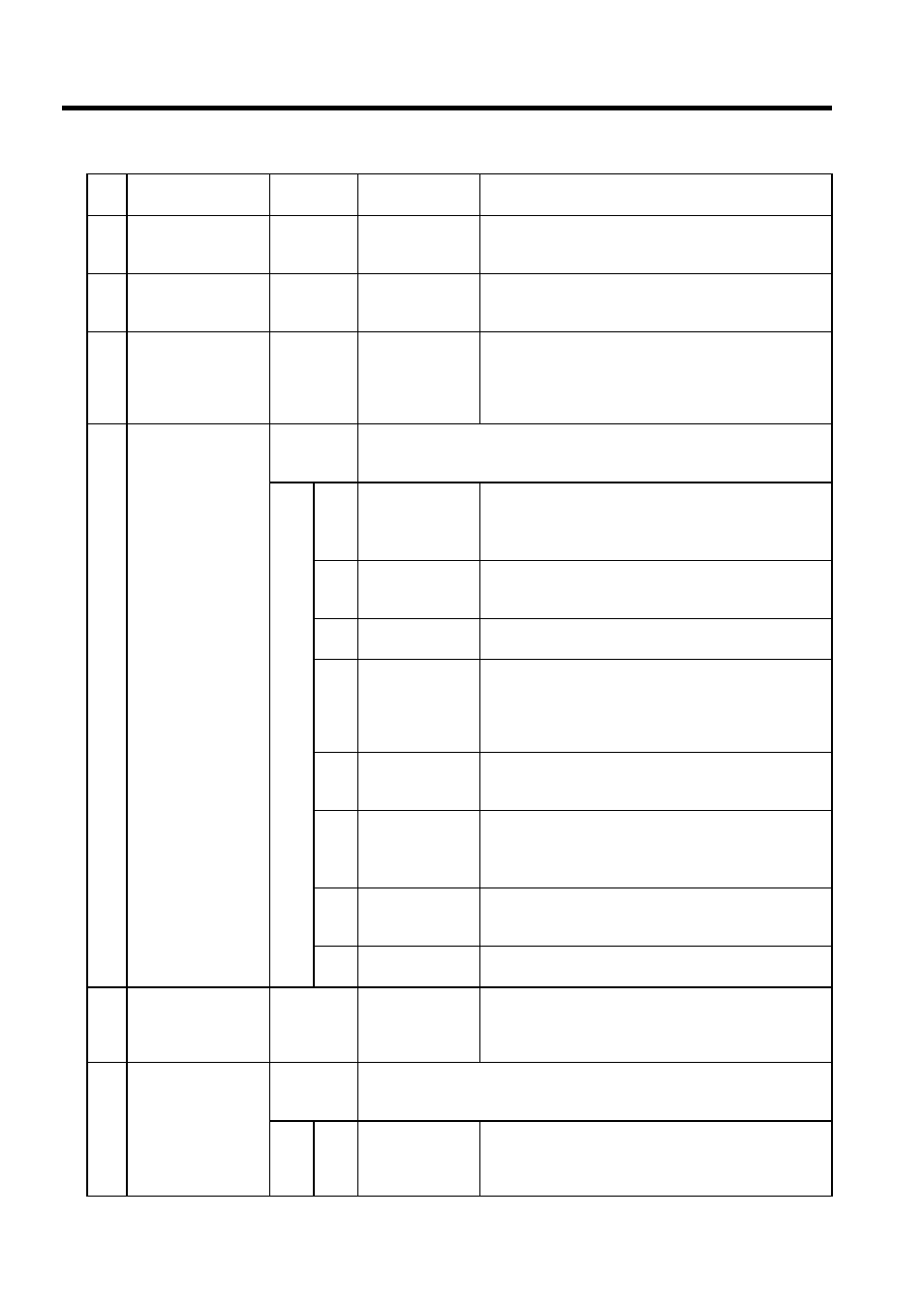
17
Cumulative Rotations
from Absolute
Encoder (ABSREV)
ILC010
-2
31
to 2
31
-1
This parameter indicates the cumulative number of rotations
received from the absolute encoder. It is valid only when
using an absolute encoder.
19
Initial Incremental
Pulses from Absolute
Encoder (IPULSE)
ILC012
-2
31
to 2
31
-1
This parameter indicates the initial number of incremental
pulses received from the absolute encoder. It is valid only
when using an absolute encoder.
21
Motion Command
Response Code
(MCMDRCODE)
IWC014
0 to 65535
This parameter indicates the OWC020: Motion Command
Code that is currently executing. Refer to OWC020 for
details on motion commands. The parameter is valid in Posi-
tion Control Mode when an OWC020: Motion Command
Code is used.
22
Motion Command
Status (MCMDSTS)
IWC015
These parameters indicate the executing status of an OWC020: Motion Command
Code. They are valid in Position Control Mode when an OWC020: Motion Com-
mand Code is used. The bit configuration is described below.
Bit
0
Command Execut-
ing Flag (BUSY)
This parameter indicates the motion command status.
0: READY (completed)
1: BUSY (processing)
This bit is used for abort status.
1
Command Hold
Completed Flag
(HOLDL)
This parameter turns ON when a HOLD is completed. Refer
to individual motion functions for details on the HOLD
function.
2
Distribution Com-
pleted (DEN)
This parameter turns ON when the amount of movement
cleared is completed.
3
Zero Point Setting
Completed (ZSET)
This parameter turns ON when the zero point setting (ZSET)
has been executed by OWC020: Motion Command Code. It
also turns ON when b3 of IWC017: ABS System Infinite
Length Position Control Data Load Request has finished
execution.
4
External Position-
ing Signal Latched
(EX_LATCH)
This parameter turns ON when the external positioning sig-
nal is input during external positioning (EX_POSING).
5
Command Error
End (FAIL)
This parameter turns ON if an alarm occurs while a move
(positioning, feed, etc.) command is being executed. Opera-
tion cannot continue once this bit turns ON. Set the motion
command to “NOP.”
6
Zero Point Return
Completed
(ZRNC)
This parameter turns ON when zero point return or zero
point setting has been completed. It turns OFF when zero
point return begins.
7 to
15
Not used.
---
23
Number of Digits
Below Decimal
Monitor
(DECNUMM)
IWC016
0 to 5
This parameter indicates motion fixed parameter number 18:
Number of Digits Below Decimal Point and is valid in Posi-
tion Control Mode when an OWC020: Motion Command
Code is used.
24
Position Control
Status (POSSTS)
IWC017
This parameter indicates status related to position controlled by MP940 Modules.
It is valid in Position Control Mode when an OWC020: Motion Command Code is
used. The following shows the bit configuration.
Bit
0
Machine Lock ON
(MLKL)
This parameter turns ON when machine lock is ON. Outputs
will not be made to the SGDH when this bit is ON. The axis
that is being controlled will be locked and will remain
stopped.
No.
Name
Register
No.
Bit Name
Description