Sgdh – Yaskawa MP940 User Manual
Page 429
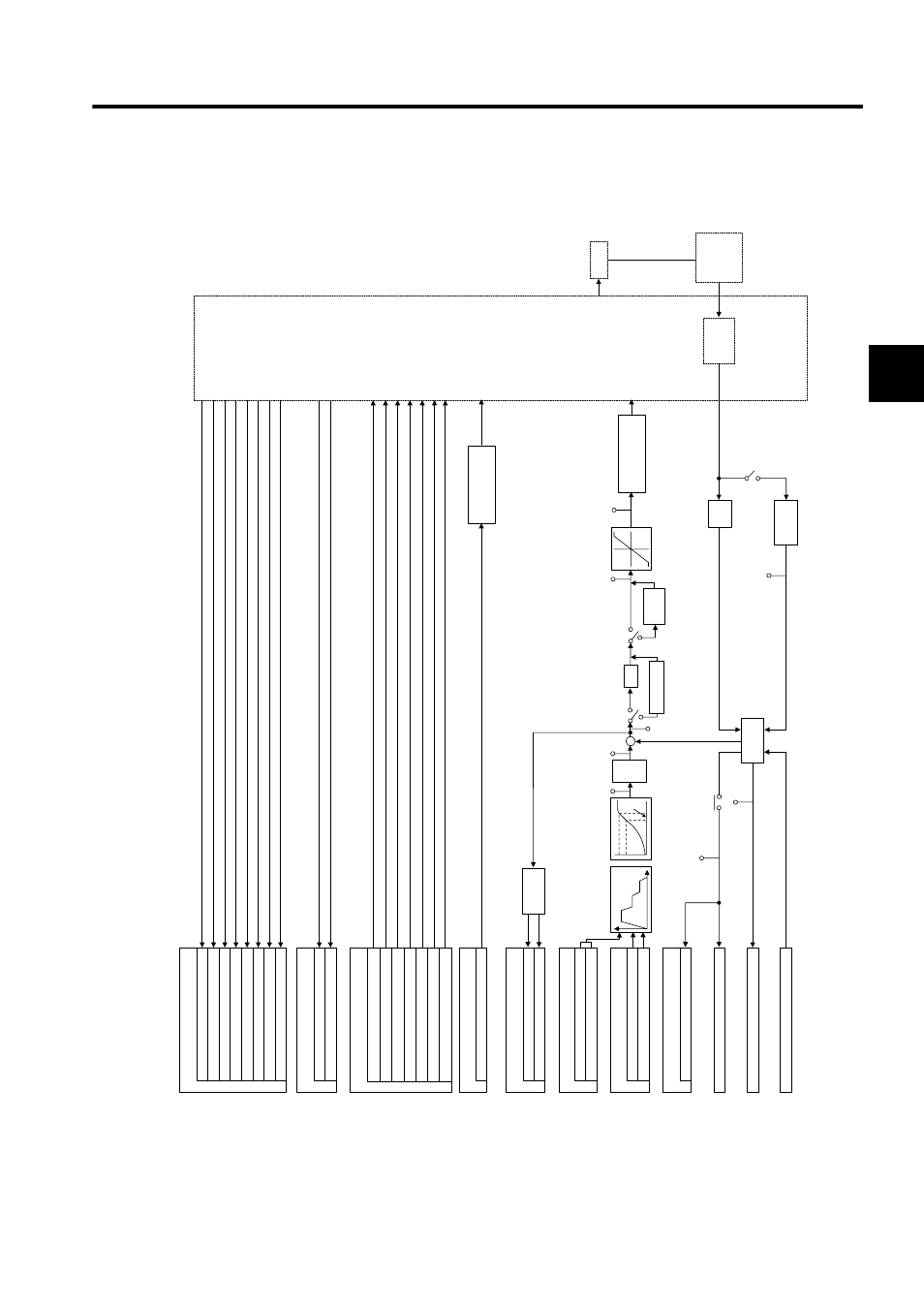
11.2 Control Modes
11-27
11
Fig 11.16 MP940 SVA Zero Point Return Mode Block Diagram
SGDH
ILC
006
(LPO
S)
ILC
008
(APO
S)
IL
C
010
(AB
SREV)
IL
C
012
(IPULSE)
IWC
00C
(SPDREF)
OW
C
0
04
(N
LI
M
P
)
0
OW
C0
05
(N
LI
M
N
)
v
t
t
p
Ts
δp
Kp
OB
C
02
1B
OWC0
10
+
-
OF
F
ON
=0
≠
0
OWC
0
37
IL
C
00
A
(P
ER
R
)
IL
C00
2
(C
PO
S)
ILC
0
04
(P
TGD
IF
)
OWC0
35
OWC0
36
Ser
vodr
iv
e s
tatus
(
IWC
001)
SIO
: G
en
eral i
npu
t
--
-DI0
PE
C: Dec
el
eratio
n LS
---DI1
P-O
T:
Pos
iti
ve
O
T
--
-DI2
N-O
T: Neg
ativ
e O
T
---
DI
3
EXT
1:
Exte
rna
l i
n
pu
t si
gna
l 1
--DI
4
EXT
2:
Exte
rna
l i
n
pu
t si
gna
l 2
--DI
5
EXT
3:
Exte
rna
l i
n
pu
t si
gna
l 3
--DI
6
AL
M: S
erv
o a
larm
--
DI
7
An
a
log
mo
nit
o
r
S
p
eed m
oni
tor
(
IWC00
D)
To
rq
ue m
onit
or
(
IW
C
00E
)
S
pee
d mo
ni
to
r
To
rq
ue
mo
nit
o
r
RUN c
o
mma
nd (OWC00
1)
Run
(RUN)
-
--DO
0
S
p
ee
d lo
op
P/PI
co
ntro
l
---DO1
G
ain
s
el
ec
tio
n
-
--DO
2
Ex
te
rnal posit
iv
e
to
rque l
im
it i
npu
t
-
-DO
3
Ex
te
rnal negat
iv
e
to
rque l
im
it i
npu
t
-
-DO
4
Zero c
lam
p in
put
--
-DO
5
Se
nso
r O
N
(
S
E
N
)
To
rque
li
mit
set
ting
P
os
iti
ve
to
rq
ue
li
m
it s
ett
in
g (
O
W
C
00
2)
To
rq
u
e re
fe
re
n
ce
co
nv
er
si
on
Tor
que re
fer
ence
(t
or
qu
e li
m
it)
RUN st
a
tus (IW
C00
0)
Dev
iat
ion
er
ror
(
IB
C
0000
)
Pos
iti
oning c
o
mplet
e
d s
ignal
(I
B
C
000F
)
Dev
iat
ion
ju
dg
ement
Li
ne
ar
a
cc
el
era
tio
n t
ime
co
n
st
a
nt
Linear accelerat
ion
time const
a
nt
(O
W
C
00C)
Linear
decelerat
io
n
t
im
e
c
onst
ant
(O
W
C
00D)
Pa
ra
me
te
rs f
or
z
e
ro
po
in
t re
tu
rn
Ap
pr
oac
h spe
ed se
ttin
g (
O
WC
00A)
Cr
eep s
pe
ed s
etti
ng (
O
WC00
B)
Zero p
o
int
re
tur
n spe
ed
gen
er
at
ion
Po
si
tio
n
pa
tter
n
ge
ne
ra
tion
Tar
get
posi- tio
n
com
p
u-
ta
tio
n
PI
c
o
ntrol
Pr
im
ary
delay
S
peed
li
m
-
ite
r
S
peed
ref
e
rence
con
versi
on
S
peed
r
e
fe
rence
Mo
to
r
R
U
N
st
at
us (
IW
C
00
0)
DI
lat
ch c
omplet
ed s
ignal
(I
B
C
000B
)
Ma
chi
ne
co
ord
inat
e l
at
ch p
osi
tio
n (
ILC
0
08)
Mac
h
in
e
coo
rdinat
e
f
eedbac
k (I
LC
006)
Z
er
o poi
nt o
ffs
et (
O
LC00
6)
Ex
te
rna
l
latch
si
gn
al
P
resent
pos
i-
tion co
mput
a-
tio
n
M
u
ltipli-
ca
tio
n
R
e
ce
iv
in
g
abso
lu
te
p
o
si
-
tion dat
a
Ab
solute
en
cod
e
r
Div
ider
A
b
sol
u
te
/
in
cr
emen-
tal enc
oder