6 interpolation with position detection (latch), Overview, Details – Yaskawa MP940 User Manual
Page 476
Motion Control
11.4.6 Interpolation with Position Detection (LATCH)
11-74
6. When interpolation (INTERPOLATE) is set as the motion command, the axis performs
interpolation feed using the specified motion parameter.
7. Stop refreshing the position reference (OLC012).
8. When the axis enters the Positioning Completed Range (OWC00E) after Distribution
Completed (bit 2 of IWC015 is ON), the POSCOMP Positioning Completed Signal (bit
D of IWC000) turns ON.
11.4.6 Interpolation with Position Detection (LATCH)
Overview
In the same way as for an interpolation feeding, the latch signal is used to latch the current
position counter while the interpolation feed is being executed, and reports the changed latch
position converted to the reference unit system.
A specific discrete input (DI input) is used for the latch signal.
Details
For details on interpolation operations, refer to
11.4.5 Interpolation (INTERPOLATE)
.
When latching is performed again after current position counter latching has been executed once by the
latch signal, first set the motion command to NOP for 1 scan or more, and then execute the LATCH
command.
Settings will be set as follows by the fixed parameter 13 (DI latch detection signal selection): 0: EXT3;
1: Phase C.
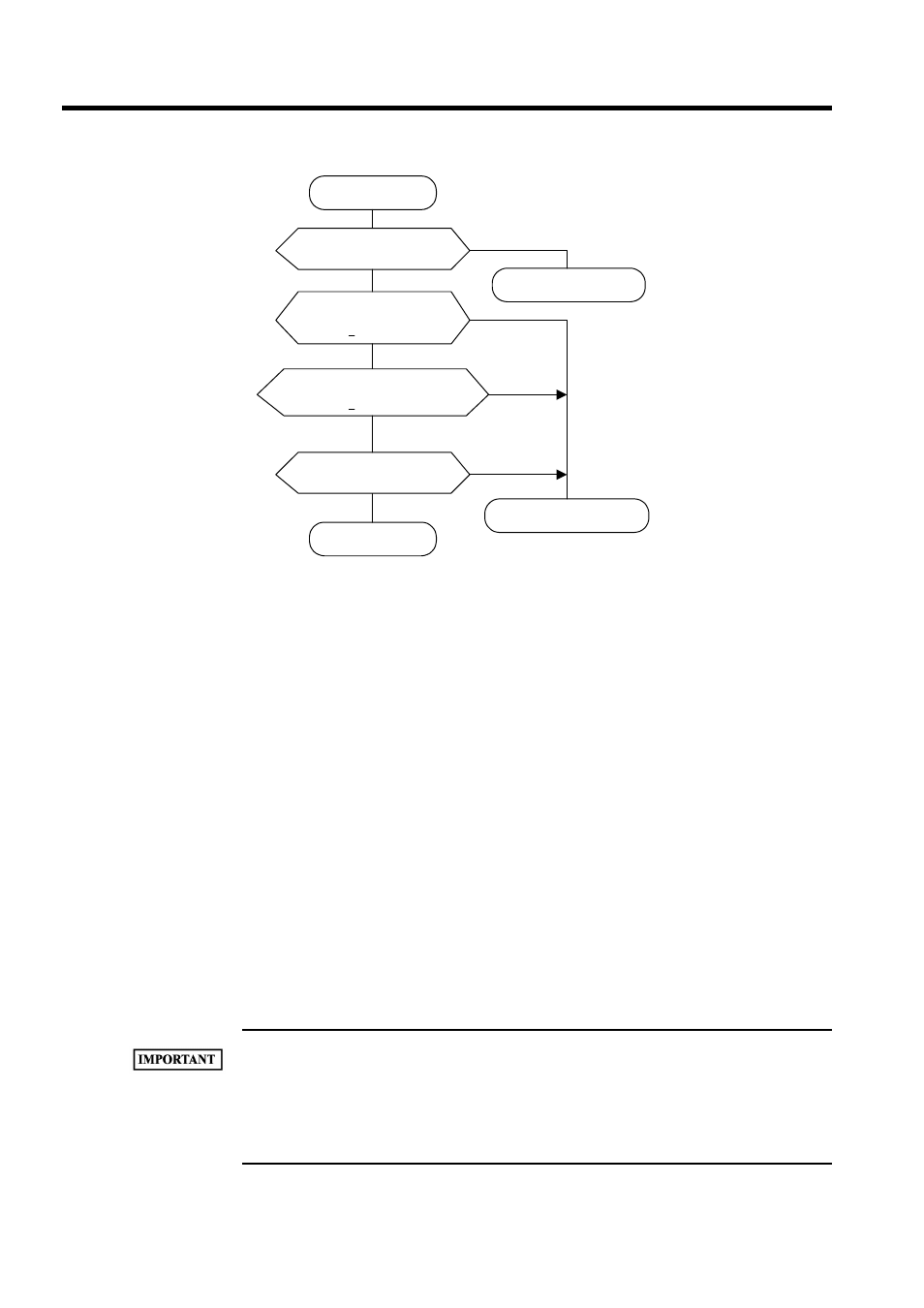
INTERPOLATE
=
NOP∥INTERPOLATE∥
ENDOF INTERPOLATE?
YES
YES
YES
NO
NO
NO
=
NOP∥INTERPOLATE∥
ENDOF INTERPOLATE?
BUSY=OFF?
YES
NO
Start condition check
Control mode = position
control mode?
Return (NG)
Motion command code
Motion command response
Motion command status
Return (NG)
Return (INTERPO-
LATE executable)