Dec 1 + lmt + phase-c pulse, Phase-c pulse, Dec 1 + zero signal – Yaskawa MP940 User Manual
Page 256: Dec 2 + zero signal
Parameters
6.3.1 Motion Fixed Parameter Details
6-16
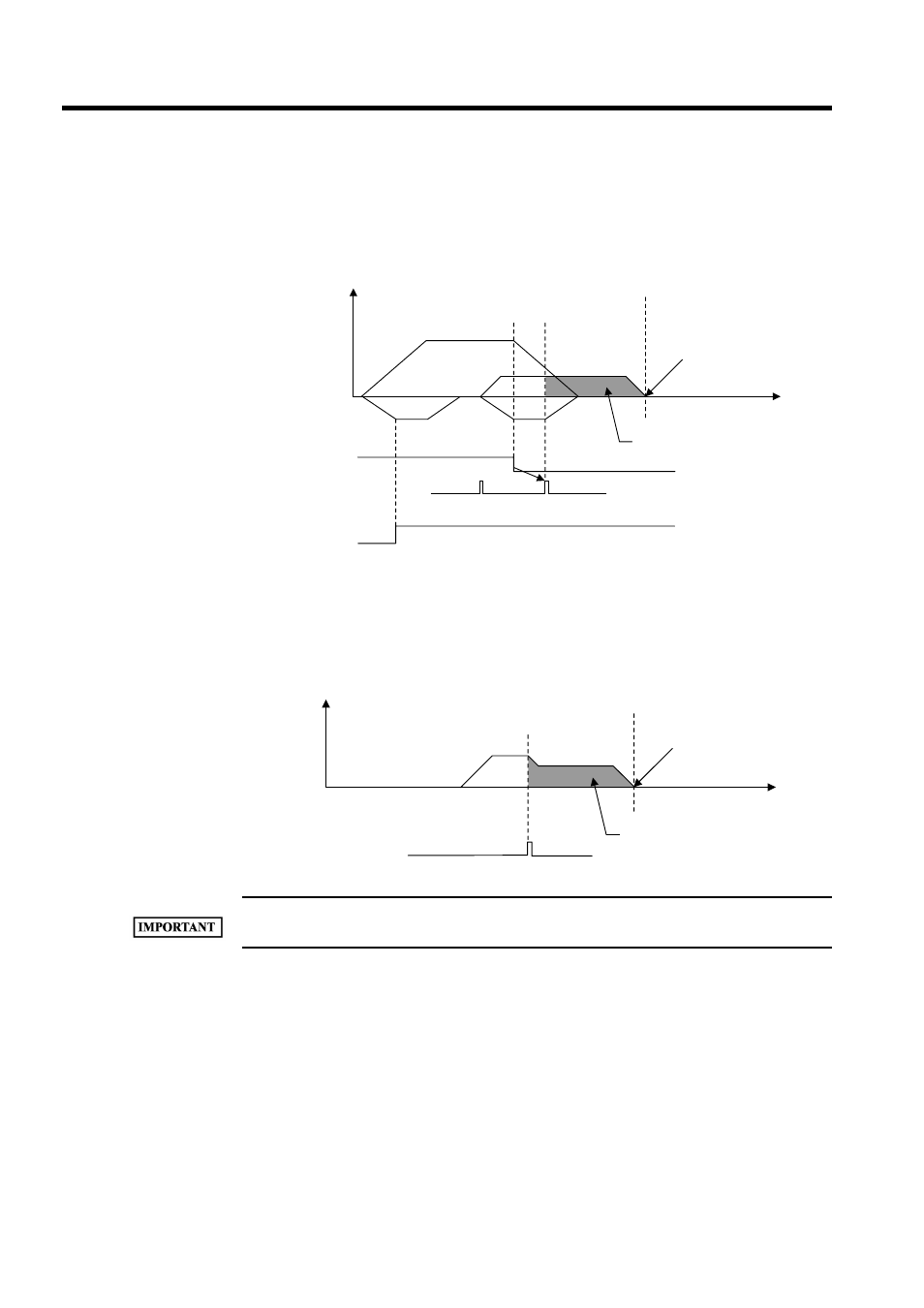
7: DEC 1 + LMT + Phase-C pulse
This method gets the current position from the forward/reverse LMT signal and escapes
automatically. It can return to the zero point from any position.
3: Phase-C pulse
This method uses just the phase-C pulse of the servomotor to return to the zero point in
machines that are not equipped with deceleration LS and other capabilities.
Connect the ZERO signal to EXT2 on the SERVOPACK.
2: DEC 1 + Zero Signal
In place of the phase-C pulse of the DEC 1 + phase-C pulse method, this method uses the
zero signal to return to the zero point.
4: DEC 2 + Zero Signal
In place of the phase-C pulse of the DEC 2 + phase-C pulse method, this method uses the
zero signal to return to the zero point.
0
3.
4.
7.
6.
5.
8.
2.
1.
Reverse
Forward
← →
Zero point
Speed
reference
Rapid traverse speed
Creep speed
Zero point
return position
Approach speed
Zero point return
final travel distance
Time
Dog (Deceler-
ation LS)
Zero point signal
(phase-C pulse)
Zero point return
reverse limit signal
(LMT_L)
0
1.
2.
3.
Reverse
Forward
← →
Zero point
Speed
reference
Approach speed
Creep speed
Zero point
return position
Time
Zero point return
final travel distance
Zero point signal
(phase-C pulse)