4 multi-turn limit setting, Warning – Yaskawa MP940 User Manual
Page 325
7.2 Starting the Absolute Position Detection Function
7-11
7
7.2.4 Multi-turn Limit Setting
When implementing absolute detection systems for a machine whose motor turns m times in
response to n turns in the load shaft, such as round tables, it is convenient if the multi-turn
data from the encoder is reset to 0 every m turns. The Multi-turn Limit Setting allows the
value m to be set for the encoder.
The use of an absolute encoder can be specified by setting the following parameter.
Set “0” to enable the absolute encoder.
The multi-turn limit is set in the SERVOPACK using the following parameter.
If the Multi-turn Limit Setting is set to 65535 (factory setting), the multi-turn data will vary
from -32768 to 32767. If any other value is set, the multi-turn data will vary from 0 to the
setting of Pn205.
If the servomotor rotates in the negative direction from 0, the multi-turn data will change to
the value set for Pn205. If the servomotor rotates in the positive direction from the value set
in Pn205, the multi-turn data will change to 0. Set Pn205 to m - 1.
Turn the power OFF and then back ON after changing the setting of parameter Pn002.2 or Pn205.
The multi-turn limit value in the encoder is factory set to 65535, the same as the SERVO-
PACK. If the multi-turn limit value in the SERVOPACK is changed with Pn205 and then the
SERVOPACK power is turned OFF and ON, the following alarm will occur.
• There is no need to change the multi-turn limit except for some special application. Changing
the data unintentionally is very dangerous.
• If a multi-turn value mismatch alarm occurs, first check if the Pn205 SERVOPACK parameter is
correct.
If the operation for Fn013 is performed while the value of Pn205 is still incorrect, the incorrect value will
be set in the encoder. The alarm will be cancelled, but there is a danger that the machine will move to an
unmeasured position by detecting a highly inaccurate position.
WARNING
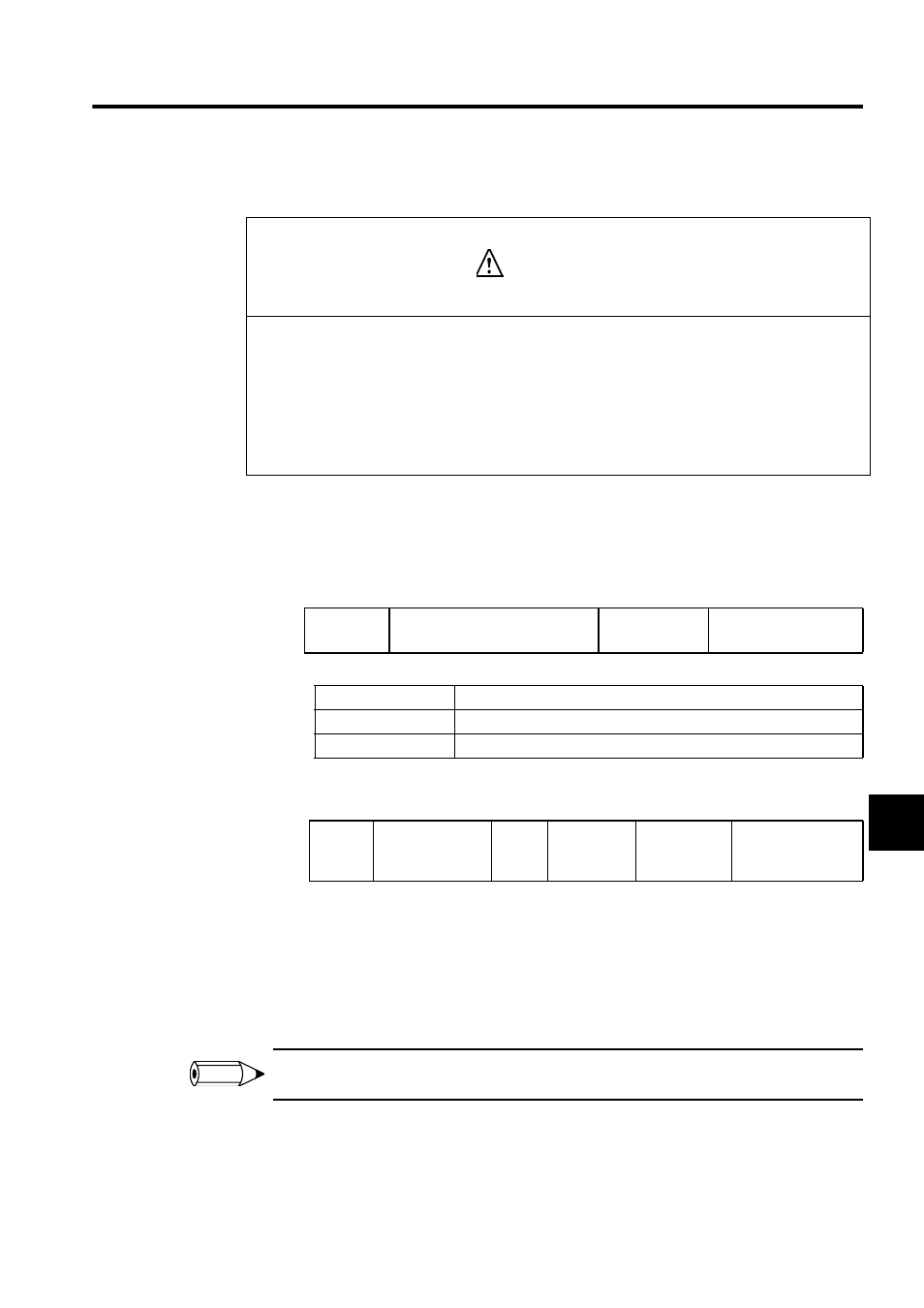
Pn002.2
Absolute Encoder Usage
Factory Setting:
0
Speed/Torque Control,
Position Control
Pn002.2 Setting
Contents
0
Use the absolute encoder as an absolute encoder.
1
Use the absolute encoder as an incremental encoder.
Pn205
Multi-turn Limit
Setting
Unit:
rev
Setting
Range:
0 to 65535
Factory
Setting:
65535
Speed/Torque
Control, Position
Control
INFO