2 precautions in changing to position control mode, Position control using motion commands – Yaskawa MP940 User Manual
Page 445
11.3 Position Control
11-43
11
11.3.2 Precautions in Changing to Position Control Mode
Position operations when changing to the position control mode or when changing the posi-
tion reference in the position control mode are described below.
Position Control Using Motion Commands
In relation to the present position, target position, and deceleration start position
1
when
changing to the position control mode or when changing the position reference in the posi-
tion control mode, positioning operations are classified into the following two patterns.
Deceleration start position
The position at which deceleration must be started in order to move to the target position in
the value set for the deceleration time.
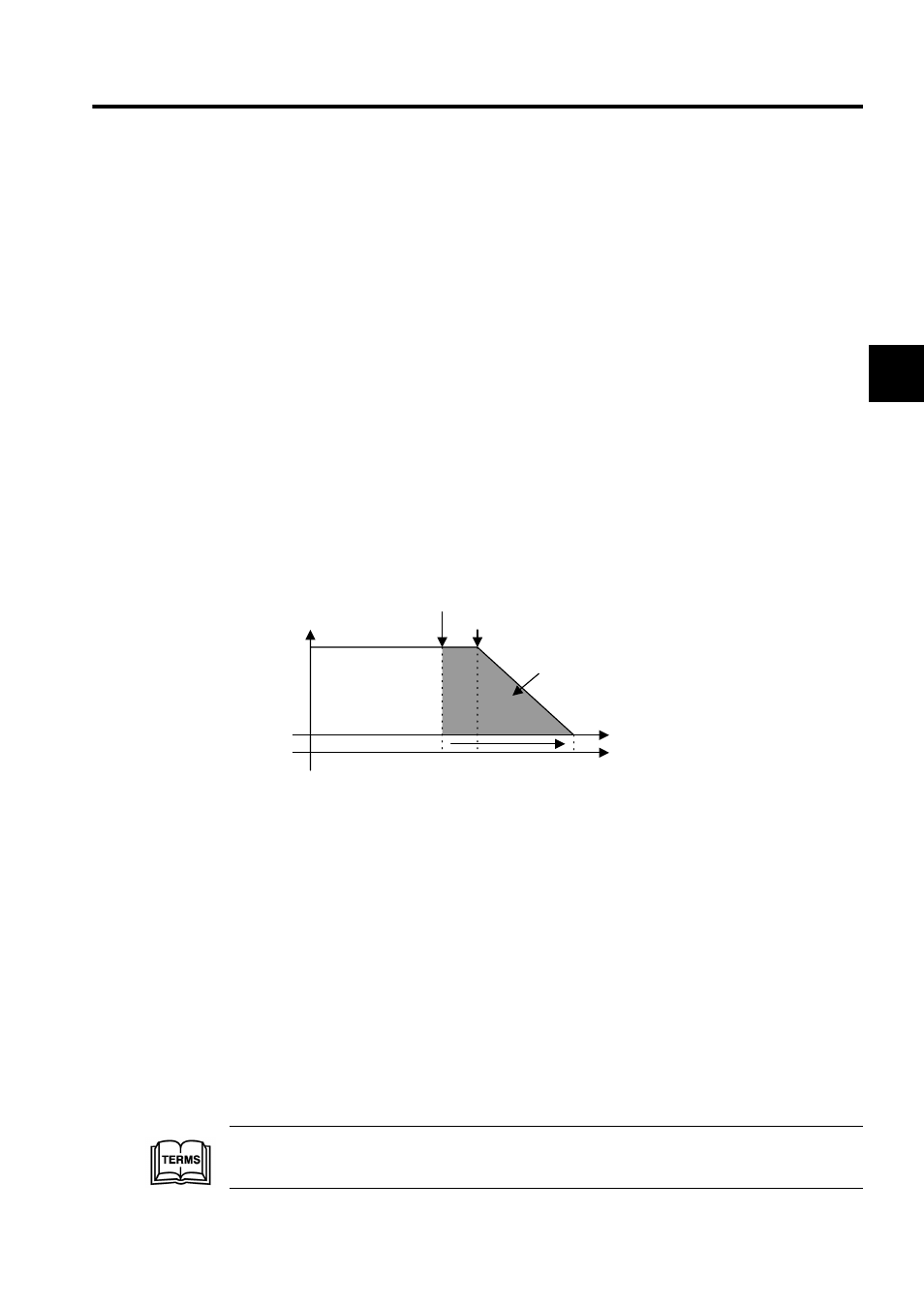
Pattern 1: Present position < Target position, Present position ≦
Deceleration start position
Speed is decelerated for a time set in the deceleration time setting.
1
Deceleration start position
The position at which deceleration must be started to position at the target position using the specified deceleration time
setting.
①
③
②
Speed
Target position change point
Deceleration start position
Travel distance
to the target
position
1 Present position
2 Target position
3 Deceleration start position
Time
Position