Yaskawa MP940 User Manual
Page 297
6.4 Parameters for SGDH SERVOPACK
6-57
6
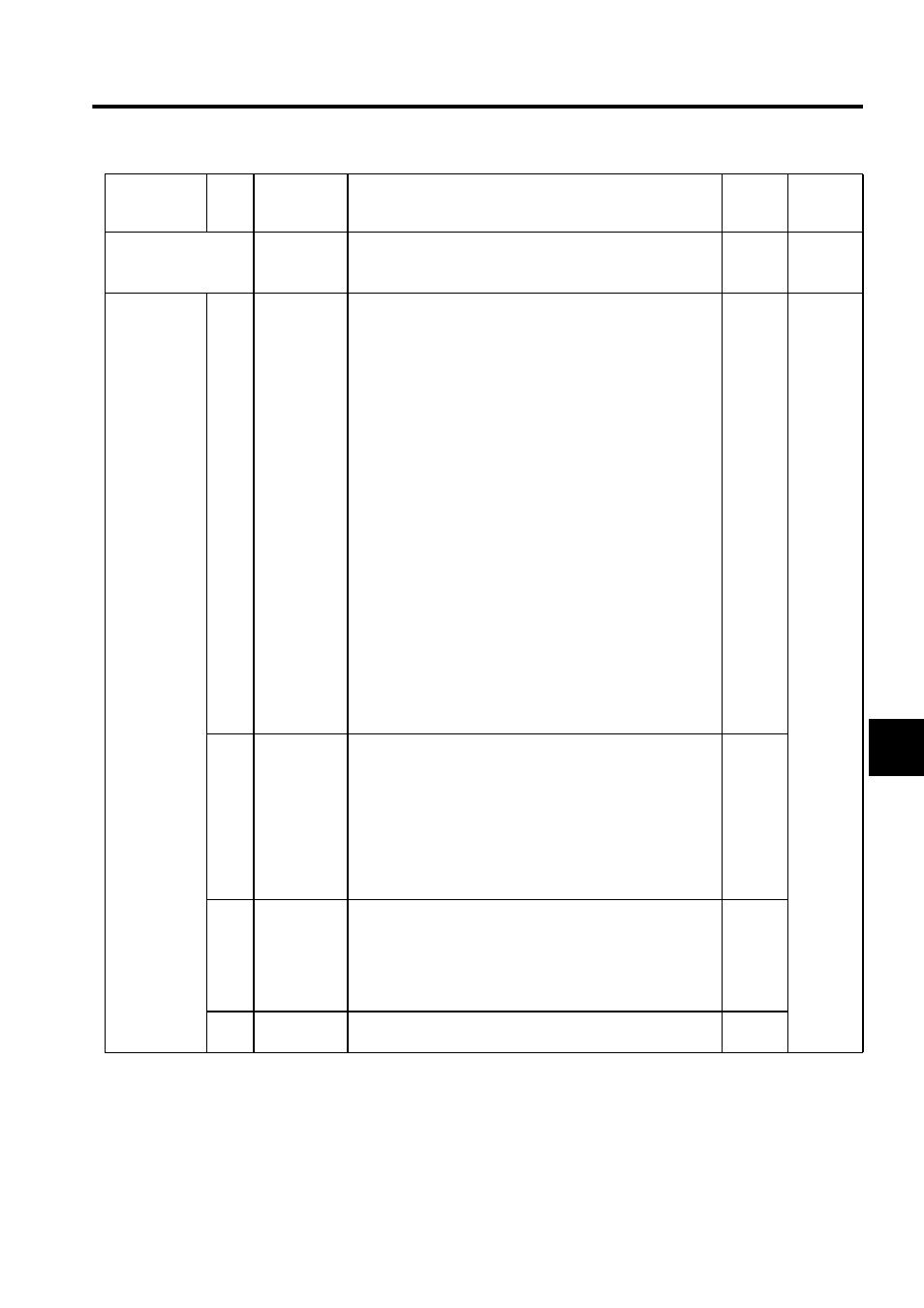
Pn10F
Mode Switch: Error
Pulse
Reference
unit
0 to 10000
Do not use this parameter when using an MP940.
0
Position
Pn110
Online
Autotuning
Switches
0
Real-time
Autotuning
Method
(0, 1, 2)
The following parameter is used for setting the autotuning condi-
tions.
0:Autotuning is performed only when the system runs for the
first time after the power is turned ON. After the load moment
of inertia is calculated, the calculated data is not refreshed.
If the load moment of inertia change is minimal or if the appli-
cation makes few changes, there is no need to continue calcu-
lating the moment of inertia while the system is in operation.
Instead, continue to use the value that was calculated when the
system was first started up.
1:Autotuning is continuously performed (moment of inertia
value calculation).
Set this parameter to “1" if the load moment of inertia always
fluctuates due to the load conditions. Then the response char-
acteristics can be kept stable by continuously refreshing the
moment of inertia calculation data is refreshed continuously
and reflecting them in the servo gain.
If the load moment of inertia fluctuation results within 200
ms, the moment of inertia calculation data may not be
refreshed properly. If that happens, set Pn110.0 to “0” or “2.”
• 2: The real-time autotuning function is not used.
Set Pn110.0 to “2” if autotuning is not available or if the
online autotuning function is not used because the load
moment of inertia is already known and the SERVOPACK is
manually adjusted by setting the inertia ratio data in Pn103.
2
Speed
Position
1
Speed Feed-
back Com-
pensation
Selection
(0, 1)
Use the following parameter to enable or disable speed feedback
compensation.
This parameter can be left as it is if online autotuning is per-
formed. If this parameter is set manually, however, the setting is
reflected to the operational setting made during online autotun-
ing.
0: Enabled
1: Disabled
Refer to Pn111: Speed Feedback Compensation.
1
2
Friction Com-
pensation
Selection
(0, 1, 2)
If this compensation function is enabled, select small or large
friction compensation according to the extent of friction in order
to ensure highly precise load moment of inertia calculation.
0: Friction compensation: Disabled
1: Friction compensation: Small
2: Friction compensation: Large
0
3
Reserved
Parameter
Do not use.
0
Parameter No. Digit
Name
(Setting
Range)
Details
Default
Control
Modes