Yaskawa MP940 User Manual
Page 512
C-13
C
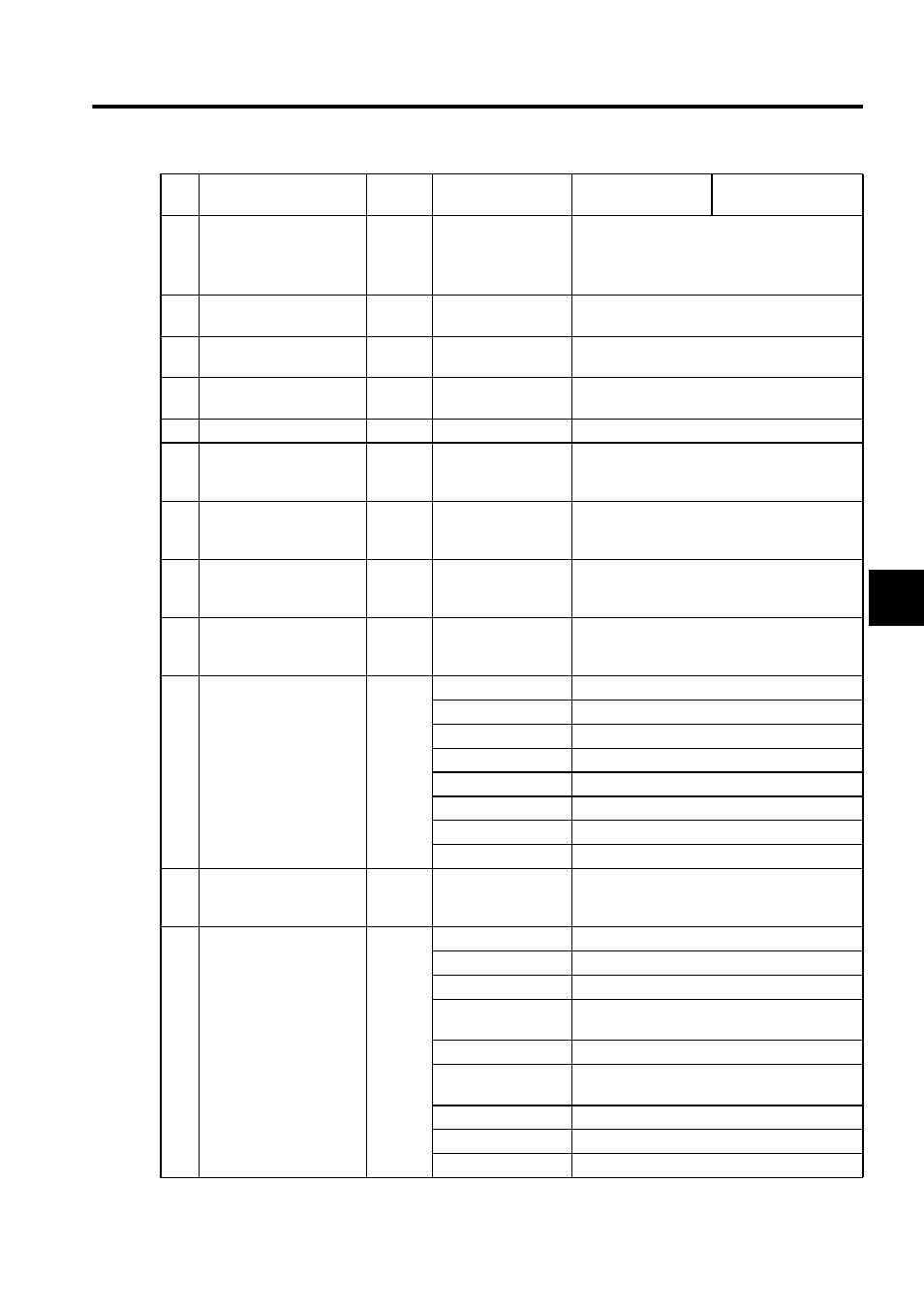
9
Machine Coordinate
System Feedback
Position (APOS)
ILC008
-2
31
to 2
31
-1
1 = 1 reference unit
(1 = 1 pulse for pulse unit)
Note: Will not be updated if the machine is
locked.
11
Position Error
(PERR)
ILC00A
-2
31
to 2
31
-1
1 = 1 pulse
13
Speed Reference Output
Monitor (SPDREF)
IWC00C
-32768 to 32767
1 = 0.01%
14
Speed Monitor
(NFB)
IWC00D
-32768 to 32767
1 = 0.01%
15
Torque Monitor (TFB)
IWC00E
-32768 to 32767
1 = 0.01%
16
Out of Range Parameter
Number
(ERNO)
IWC00F
1 to 65
101 to 148
Motion parameter error number
Motion fixed parameter error number +100
17
Cumulative Rotations
from Absolute Encoder
(ABSREV)
ILC010
0 to ±99999
1 = 1 rotation
19
Initial Incremental Pulses
from Absolute Encoder
(IPULSE)
ILC012
-2
31
to 2
31
-1
1 = 1 pulse
21
Motion Command
Response Code
(MCMDRCODE)
IWC014
0 to 65535
Motion command that is currently executing.
(Refer to OWC020 for details.)
22
Motion Command Status
(MCMDSTS)
IWC015
Bit 0: BUSY
Command Executing Flag
Bit 1: HOLDL
Command Hold Completed
Bit 2: DEN
Distribution Completed
Bit 3: ZSET
Zero Point Setting Completed
Bit 4: EX_LATCH
External Positioning Signal Latched
Bit 5: FAIL
Command Error End
Bit 6: ZRNC
Zero Point Return Completed
Bit 7 to 15:
Not used.
23
Number of Digits Below
Decimal Point Monitor
(DECNUMM)
IWC016
0 to 5
Copies motion fixed parameter Number of Digits
Below Decimal Point.
24
Position Control Status
(POSSTS)
IWC017
Bit 0: MLKL
Machine Locked
Bit 1: ZERO
Zero Point Position
Bit 2: PSET2
Second In-position Completed
Bit 3: ABSLDE
ABS System Infinite Length Position Control
Data Load Completed
Bit 4: TPRSE
Preset no. of POSMAX Turns Completed
Bit 5: GEARM
Copies Motion Fixed Parameter “Electronic Gear
Enabled Selection.”
Bit 6: MODSELM
Copies motion fixed parameter “Axis Selection.”
Bit 7 to 11:
Not used.
Bit 12 to 15:
Not used.
No.
Name
Register
No.
Bit Name
(Setting Range)
Meaning
Remarks