1 system startup procedure – Yaskawa MP940 User Manual
Page 320
Absolute Position Detection
7.2.1 System Startup Procedure
7-6
7.2 Starting the Absolute Position Detection Function
This section describes the procedure that is used to start the Absolute Position Detection Func-
tion.
7.2.1 System Startup Procedure
The SERVOPACK, servomotor, and other peripheral devices must be checked before start-
ing up the absolute position detection system.
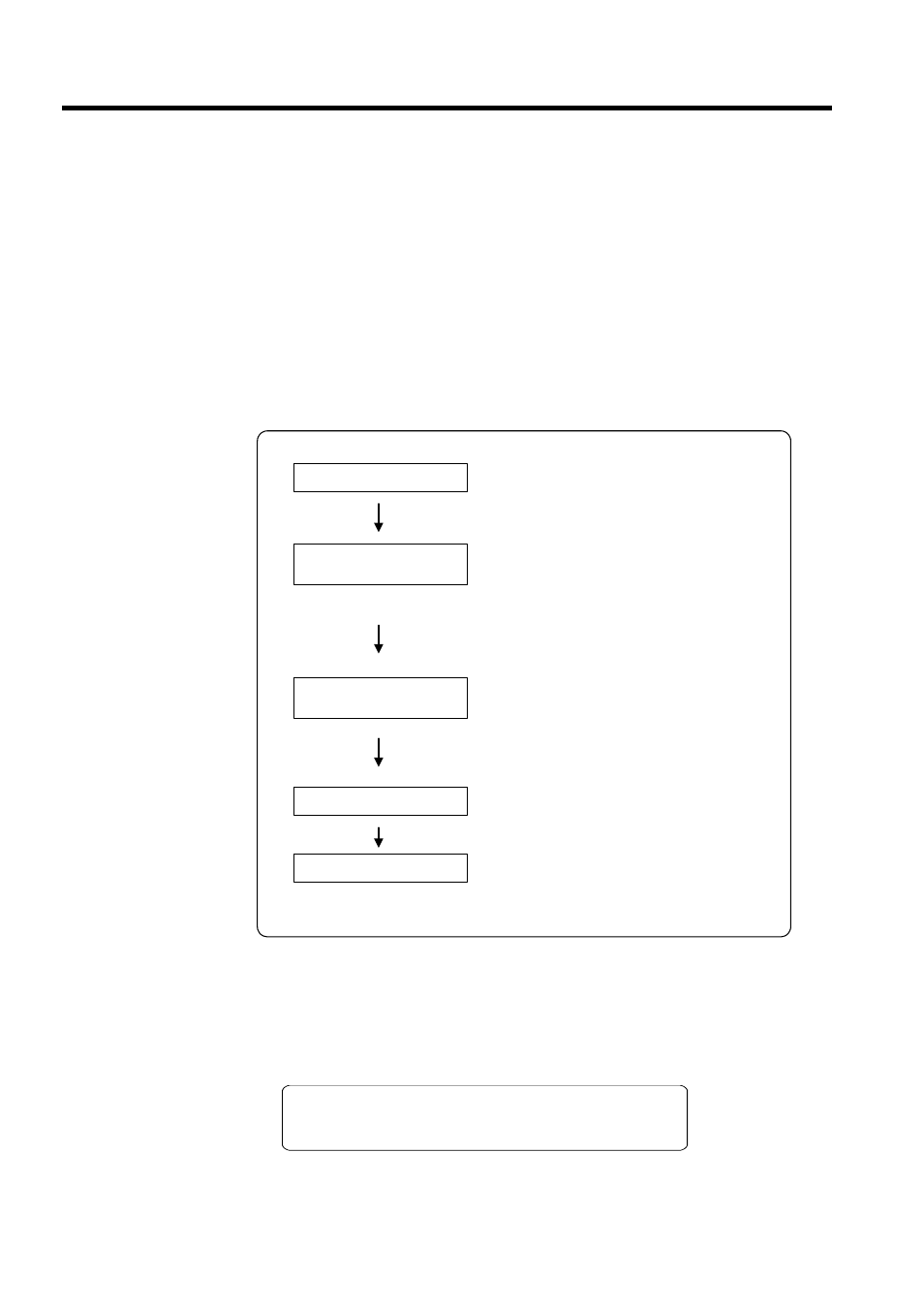
Use the following procedure to start up the system.
The status of the encoder will change to operation preparation complete status if steps 1 to 5
are successfully completed, and the absolute position detection system will be ready for
operation.
Perform the absolute position detection system startup procedure in the following situations.
①
②
③
④
⑤
・・・
・・・
・・・
・・・
・・・
Check devices
Check to see if the SERVOPACK, servo-
motor, and cables are the right products
and models for the absolute encoder.
Check parameters related
to the SERVOPACK.
Check to see if the SERVOPACK parame-
ters (parameters) are for an absolute
encoder.
Set parameters related to the
MP940.
Set all parameters related to the Absolute
Position Detection Function.
Initialize the absolute
encoder.
Follow the setup procedure to set the
absolute encoder to default values.
Set zero point.
Set the zero point as well as the absolute
zero point, that is, the machine coordinate
zero point.
• When starting up the absolute position detection system for the first time
• When the servomotor is changed
• When an absolute encoder-related alarm occurs