Ladder logic program example – Yaskawa MP940 User Manual
Page 424
Motion Control
11.2.4 Phase Control Mode
11-22
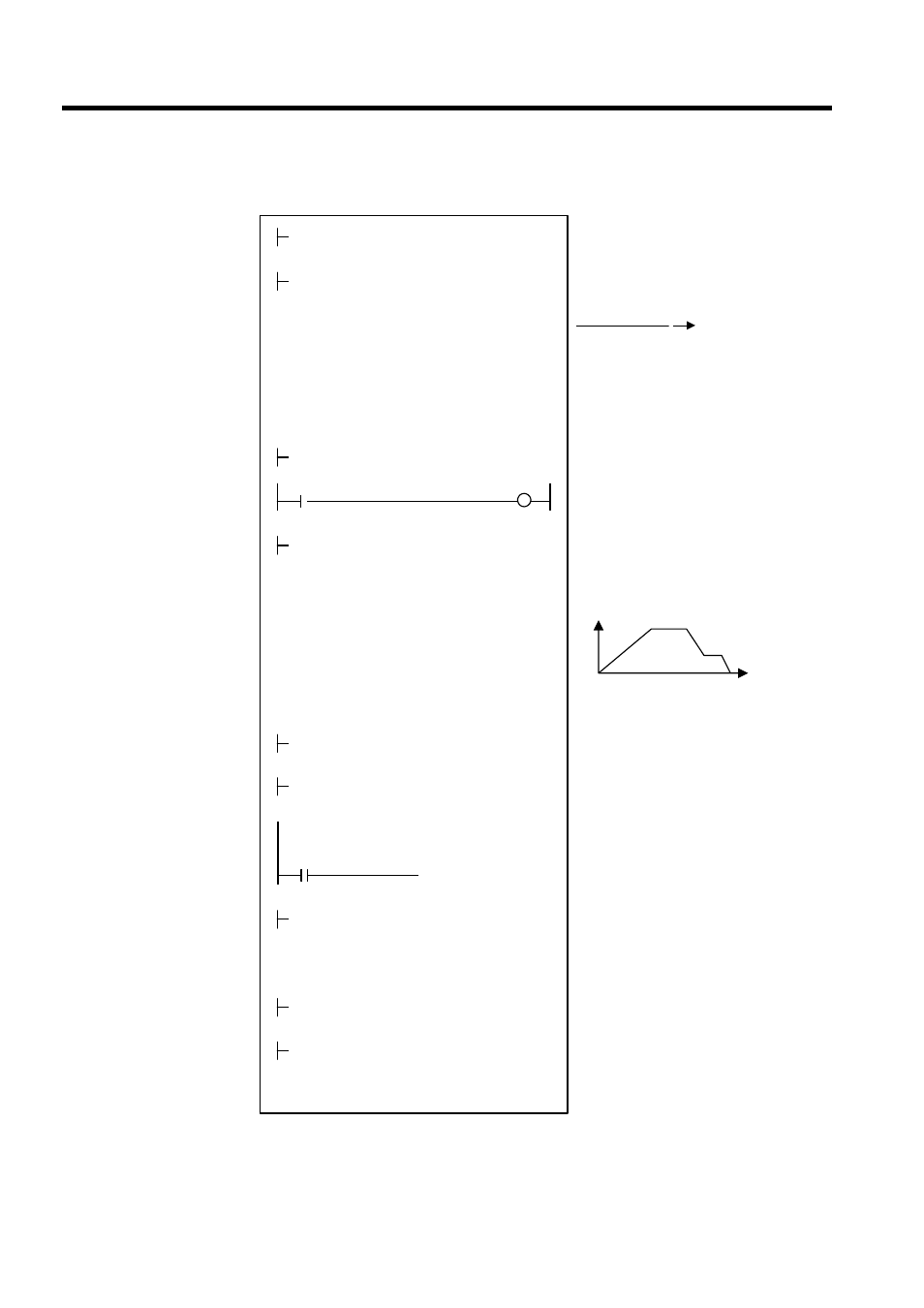
Ladder Logic Program Example
Fig 11.13 RUN Command (DWG H04)
The example in the above illustration has been greatly simplified. In actual operation, each
register can be controlled from the user program.
H0188
RUNMOD
⇒
OWC000
MW00040×SW00004
K1
TsH
÷
MW00041
K2
KS
⇒
ML03010
NR×FBppr×n
60×10
4
10000
FFGAIN
⇒
MW03012
RUN
OBC0010
PREPARE
MB010010
ML03030
MA03050
FGN
⇒
ML03020
ML03020
⇒
ML03022
-ML03024
00000
MB010020
[
ML03022]×MW03012
FFGAIN
÷
ML03010
KS
NREF
⇒
OWC015
[
ML03022][+MW03020]
PHBIAS
[⇒
OLC016]
ML03020
⇒
ML03024
DEND
Set the phase control mode to ON.
Set Phase Reference Generation
Operation Disable to ON.
Calculate the speed scaling constant (ks).
High-speed scan setting: SW0004
Numerator *MW00040
Denominator *MW00041
NR = Rated speed
FBppr = Number of feedback pulses
n = Number of pulse multipliers (1, 2,
or 4)
Reduce the fraction to the lowest terms
so that it can be stored as one word.
Feed forward gain [10000/100%]
Driver RUN command (RUN)
When MB01010 turns ON, phase con-
trol starts.
PHASE REFERENCE
DISPLACEMENT
PATTERN
DISPLACE-
MENT X
The phase reference displacement
[pulse] is read from the FGN function.
Displace-
ment x
Position
reference
The FGN pattern is set in advance.
DISPLACE-
MENT X
PREVIOUS
VALUE
CHANGE
Changes [pulses] per scan
RUN command
When RUN command MB010020 turns
ON, the machine operates at the refer-
ence speed NREF. When MB010020
turns OFF, the reference speed NREF
remains at “0.”
CHANGE
Standard speed reference setting
[0.01%]
POSITION
BIAS
DISPLACE-
MENT X
Phase compensation setting [pulse]
DISPLACE-
MENT X
PREVIOUS
VALUE
Phase reference previous displacement
value [pulse]