Yaskawa MP940 User Manual
Page 266
Parameters
6.3.2 Motion Setting Parameter Details
6-26
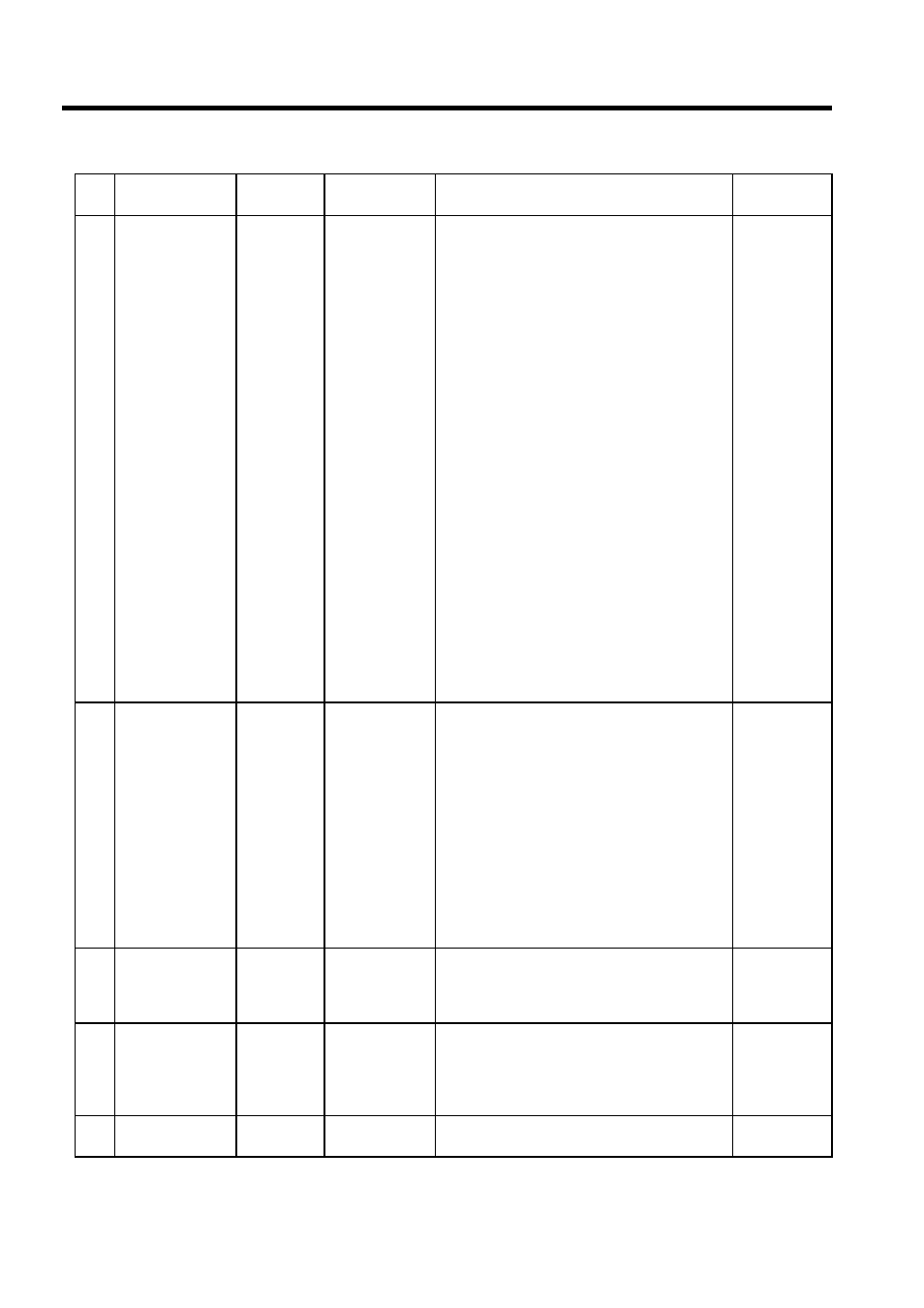
21
Filter Time
Constant Setting
(NNUM)
OWC014
1. Average
move filter 0
to 255
(0 = 1 = no
filter)
2. Exponential
acceleration/
deceleration
0 to 32767
Set this parameter when performing simple S-
curved acceleration/deceleration in speed refer-
ence output or position control mode.
Speed Reference Output Mode
Calculates the average move for the speed refer-
ence (Vr) and makes that value the speed refer-
ence.
Position Control Mode
Calculates the average move for the clear pulse
(p) every scan and makes that value the position
reference. Averaging will not be calculated in the
following situations.
• When switching during operation to Speed or
Position Control Mode
• When the average number is changed during
operation
OWC020: Motion Command Code Used in Posi-
tion Control Mode
The setting range for the filter time constant will
vary with bit 4 to bit 7 of OWC021: Filter Type
Selection.
• Filter type 1 = Exponential filter 0 to 32767
• Filter type 2 = Average move filter 0 to 255
Note: This parameter will be valid when IBC0152:
Distribution Completed turns ON if the filter
time constant is changed.
0
22
Speed Reference
Setting (NREF)
OWC015
-32768 to 32767
Speed Reference Output Mode
Set the speed reference in 0.01% units.
Position Control Mode
Set the speed reference in a steady state in 0.01%
units.
OWC020: Motion Command Code Used in Posi-
tion Control Mode
Set the rapid traverse speed in 0.01% units (per-
centage of the rated motor speed) when the
Speed Reference Selection (OBC001D) is set to
1.
Phase Control Mode
Set the standard speed reference in 0.01% units.
0
23
Phase Bias
Setting (PHBIAS)
OLC016
-2
31
to 2
31
-1
Set the number of compensation pulses in Phase
Control Mode. Use this parameter to compensate
for reference pulses in control systems with no
rigidity or gain.
0
25
Speed
Compensation
Setting (NCOM)
OWC018
-32768 to 32767
Set the speed compensation in 0.01% units in
Phase Control Mode. OWC018: Speed Compensa-
tion Setting is valid even in Phase Control Mode if
bit 10 of OWC021: Speed Compensation during
Position Control is ON.
0
26
Proportional Gain
Setting (PGAIN)
OWC019
0 to 32767
Set proportional gain for PI control in 0.1 units in
Phase Control Mode.
300
(30.0)
No.
Name
Register
Number
Bit Name
Description
Default