Yaskawa MP940 User Manual
Page 303
6.4 Parameters for SGDH SERVOPACK
6-63
6
Pn404
Forward External
Torque Limit
%
0 to 800
Use this parameter to limit the torque after the machine starts to
move until it reaches a given position (external torque limit).
A contact input signal is used to enable the torque (current) lim-
its previously set in parameters. Torque limits can be set sepa-
rately for forward and reverse rotation.
Input the external torque (current) limit for forward and reverse
operation.
100
Speed
Torque
Position
Pn405
Reverse External
Torque Limit
P-CL
When ON
OBC0013=1
Use forward
torque limit.
Limit: Pn404
When OFF
OBC0013=0
Do not use
forward torque
limit.
Normal opera-
tion.
-
N-CL
When ON
OBC0014=1
Use reverse
torque limit.
Limit value:
Pn405
When OFF
OBC0014=0
Do not use
reverse torque
limit.
Normal opera-
tion.
-
During torque limit, the following signals are output:
• CLT=IBC001B
(Servo Driver Status motion monitor parameter, bit 11.)
• Monitor Mode
Un005: Nos. 6 and 7 (With factory settings)
Un006: Depending on output signal allocation conditions.
Application Examples:
• Forced stop
• Robot holding a workpiece
Parameter No.
Digit
Name (Setting
Range)
Details
Default
Control
Modes
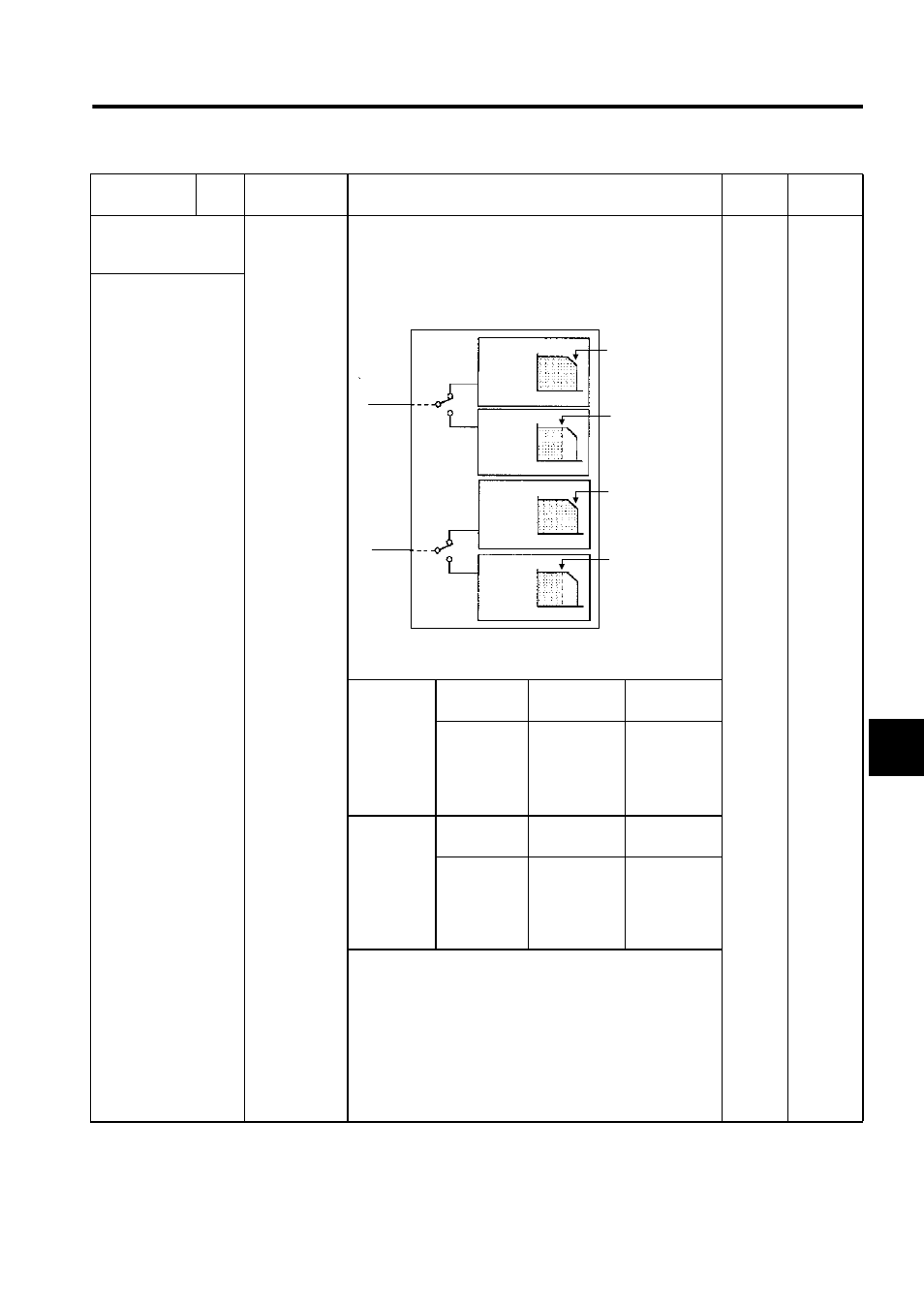
P-CL
N-CL
SERVOPACK
Forward
rotation
Reverse
rotation
Rotation
speed
Rotation
speed
Rotation
speed
Rotation
speed
Torque
Torque
Torque
Torque
Torque limit
Pn402
Torque limit
Pn402 or Pn404
(limited by which-
ever is smaller)
Torque limit
Pn403
Torque limit
Pn403 or Pn405
(limited by which-
ever is smaller)