Yaskawa MP940 User Manual
Page 298
Parameters
6.4.3 Gain-related Parameters
6-58
Pn111
Speed Feedback
Compensation*
%
1 to 500
Use this function for shortening the setting time of the system in
positioning operation.
Adjustment Procedure: When adding the value of speed feed-
back compensation, be sure to follow the procedure described
below and make servo gain adjustments while watching the ana-
log monitor to observe the position error and torque reference.
1. Set parameter Pn110 to “0002” so that the online autotuning
function will be disabled.
2. First, make normal servo gain adjustments with no feedback
compensation. In this case, gradually increase the speed loop
gain in Pn100 while reducing the speed loop integral time
constant Pn101, and finally set the speed loop gain in Pn100
to the same value as that of the position loop gain in Pn102.
The relationship between the speed loop gain and integral time
constant is as follows: Take the value obtained from the follow-
ing formula as a reference value for setting the speed loop inte-
gral time constant in Pn101.
Unit of speed loop gain [Hz]: Check the unit when setting the
speed loop integral time constant in Pn101. Pn101 can be set in
0.01 ms increments.
The unit of speed loop gain (i.e., Hz) and that of position loop
gain (i.e., 1/s) are different to each other. Set these gains to the
same value, however.
3. Repeat step 2. to increase the speed loop gain while watching
the position error of the analog monitor to observe the
setting time and the torque reference of the analog monitor
to observe any occurrence of vibration. If there is any
oscillating noise or noticeable vibration, gradually increase
the time constant of the torque reference filter in Pn401.
4. Gradually increase only the position loop gain. When it has
been increased about as far as possible, then decrease the
speed feedback compensation in Pn111 from 100% to 90%.
Then repeat steps 2. and 3.
5. Decrease the speed feedback compensation to a value lower
than 90%. Then repeat steps 2. through 4. to shorten the
setting time. If the speed feedback compensation is too low,
however, the response waveform will vibrate.
6. Find the condition in which the shortest setting time is
obtainable within the range where the position error or
torque reference waveform observed through the analog
monitor is not vibrating or unstable.
100
Speed
Position
Parameter No. Digit
Name
(Setting
Range)
Details
Default
Control
Modes
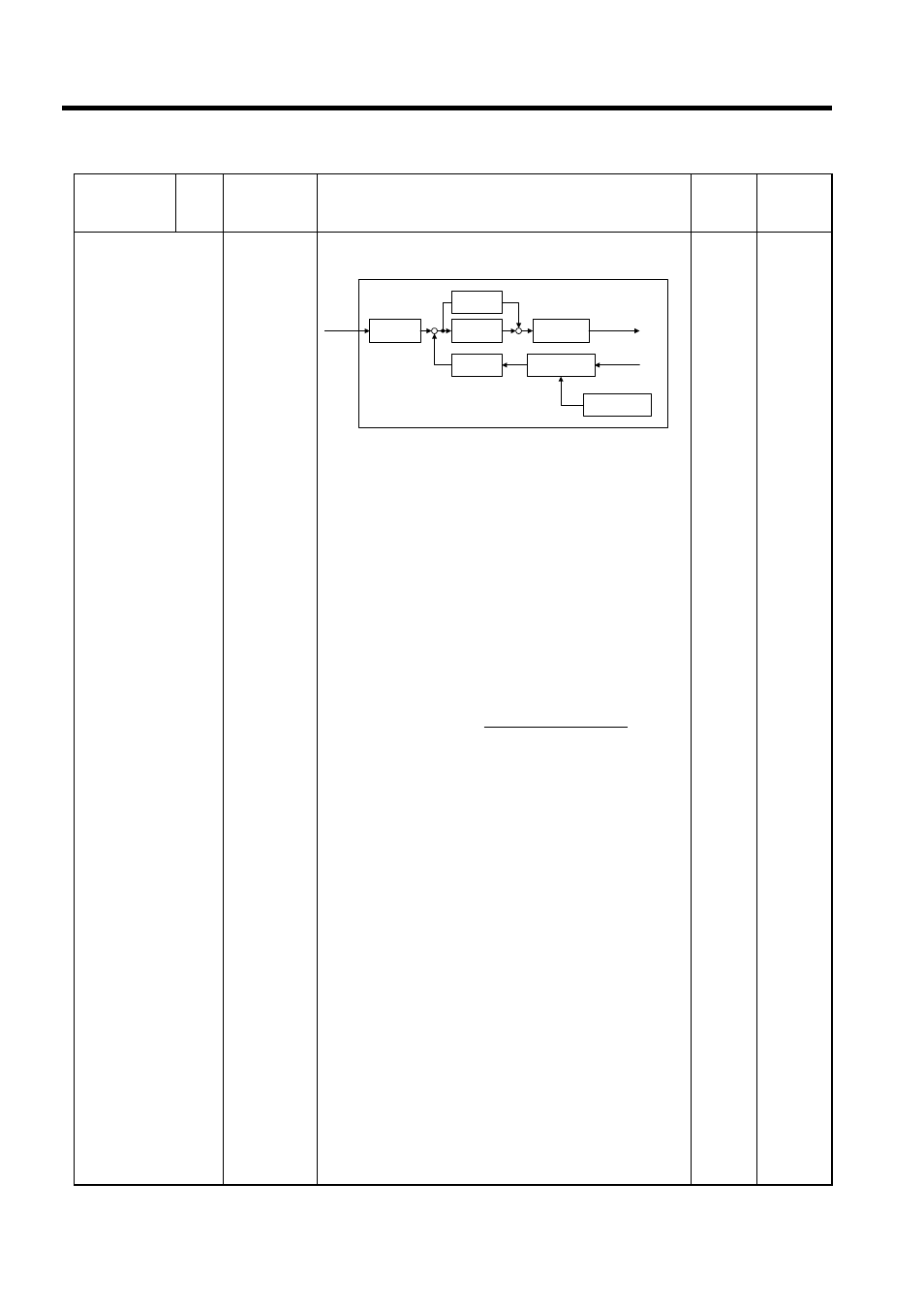
+
-
+
+
Position
loop gain
(Pn102)
Integral con-
trol (Pn101)
Speed loop
gain
(Pn100)
Speed FB fil-
ter
(pn 308)
Torque refer-
ence filter
(Pn401)
Speed feed-
back compen-
sation (Pn111)
Torque
reference
Speed
feedback
Speed feedback com-
pensation function
selection (Pn110.1)
Error
counter
output
速度ループ積分時定数=
4
2
速度ループゲイン
π
×
[sec]
2 × Speed loop gain[s]
π
Speed loop integral time
constant
4
[sec]