Yaskawa MP940 User Manual
Page 416
Motion Control
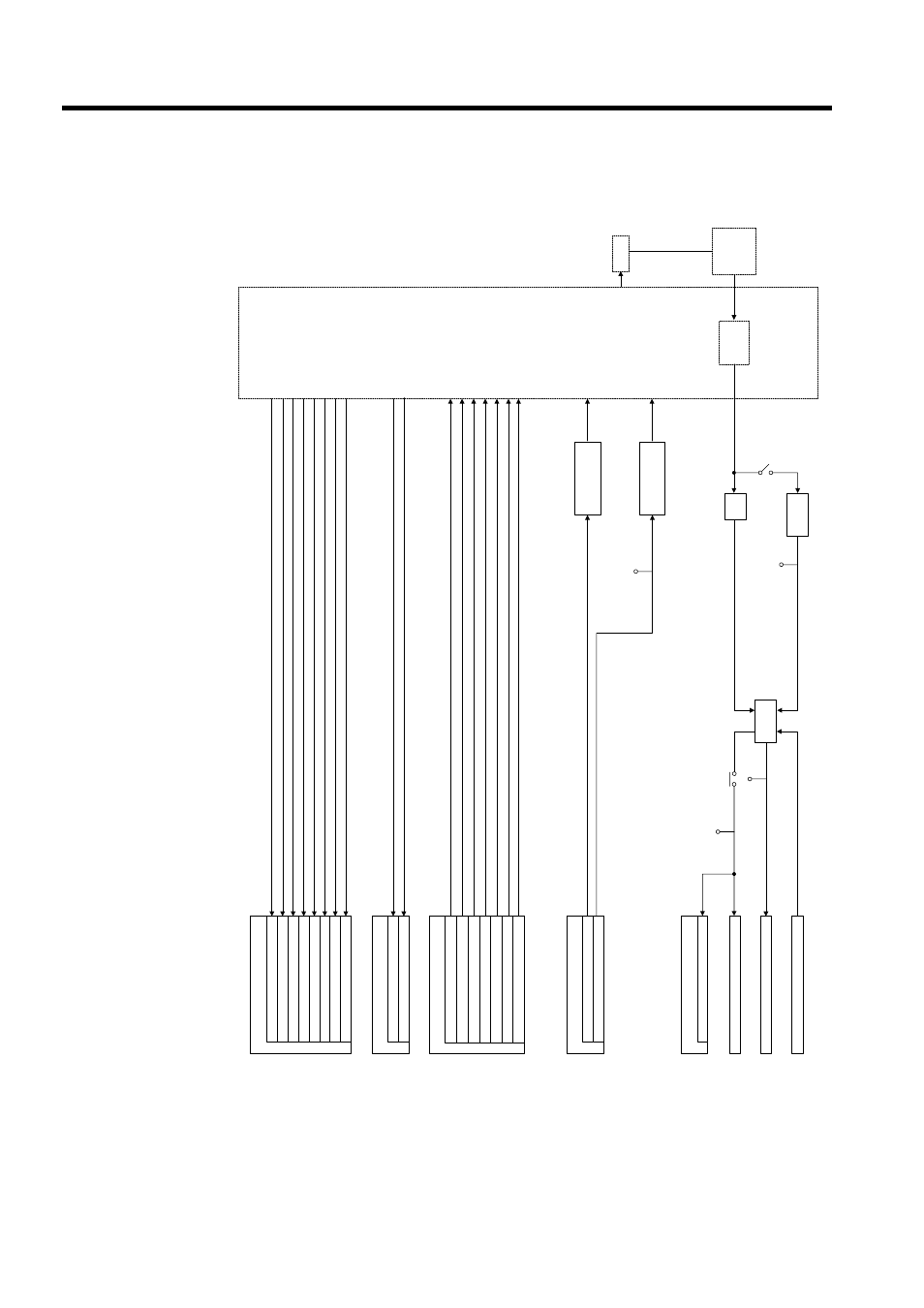
11.2.3 Torque Control Mode
11-14
Fig 11.6 MP940 SVA Torque Control Mode Block Diagram
SGD
H
IW
C
00C
(S
P
D
RE
F
)
ILC
006
(L
P
O
S
)
ILC
008
(A
P
O
S
)
ILC
010
(A
BS
RE
V)
ILC
012
(IP
U
LS
E
)
Se
rvo
d
rive st
atus (
IW
C
00
1)
SIO
: G
en
eral i
npu
t
---
DI0
PEC:
Dec
e
le
ra
tio
n
L
S
---DI1
P-O
T:
Pos
iti
ve
O
T
--
-DI2
N-O
T: Ne
gat
iv
e O
T
---
DI3
EXT
1: Exte
rna
l i
n
pu
t si
gna
l 1
--DI4
EXT
2: Exte
rna
l i
n
pu
t si
gna
l 2
--DI5
EXT
3: Exte
rna
l i
n
pu
t si
gna
l 3
--DI6
AL
M: S
erv
o a
larm
--DI7
An
al
og
m
on
itor
S
pee
d m
on
itor
(
IW
C
00D
)
To
rq
u
e m
on
ito
r (IWC0
0E
)
Sp
ee
d
m
on
ito
r
To
rq
ue
mo
nit
o
r
R
un
c
omm
an
d (O
WC
00
1)
Run (RUN)
---DO
0
S
peed
lo
op
P/PI
co
nt
rol
-
--DO
1
G
a
in s
el
ec
tion
-
--DO
2
Ext
e
rnal p
o
sit
ive
to
rque limit
input
--
D
O
3
Ext
ernal n
egat
ive
to
rque limit
input
--
DO
4
Sen
sor
c
lam
p i
nput
-
-D
O5
S
e
ns
or
ON (
S
E
N
)
Pa
ra
meter
s for
T
or
q
ue Co
ntr
ol M
ode
To
rque r
e
fe
ren
ce s
e
tt
ing (O
W
C
01B
)
S
pe
ed l
imi
t s
etti
ng (
O
WC01
C)
Tor
que
r
e
fer
enc
e
conv
er
si
on
S
peed
r
e
fer
enc
e
conv
er
si
on
Tor
que re
fer
ence
S
peed
r
e
fe
rence
(s
pe
ed li
m
it)
Mot
o
r
RUN st
a
tus (IWC0
0
0)
DI
lat
ch com
p
le
ted signal
(I
BC00B
)
M
a
chine
coordinat
e lat
ch po
sit
ion
(I
LC00
8)
M
a
chine
coordinat
e f
eedback
(I
LC
006)
Ze
ro
po
in
t o
ffse
t (
O
LC
006)
Ex
te
rn
al
la
tc
h
sign
a
l
Pres
ent
posi-
tion comp
ut
a-
tio
n
M
u
ltipli-
ca
tio
n
Rec
ei
ving
abs
o
lu
te
posi-
tio
n dat
a
Abso
lute
en
code
r
Divid
er
Abs
o
lu
te/
in
crem
en-
ta
l encoder