Changing parameters during operation – Yaskawa MP940 User Manual
Page 160
4.7 SVA Function
4-67
4
The MP940 servo control function has the following functions, which enable accurate, high-
speed control.
Position, Speed, Torque, and Phase Control Switching during Opera-
tion
Operation mode switching is performed using the RUN Mode motion setting parameter
(OWC000 bit 0 to bit 4).
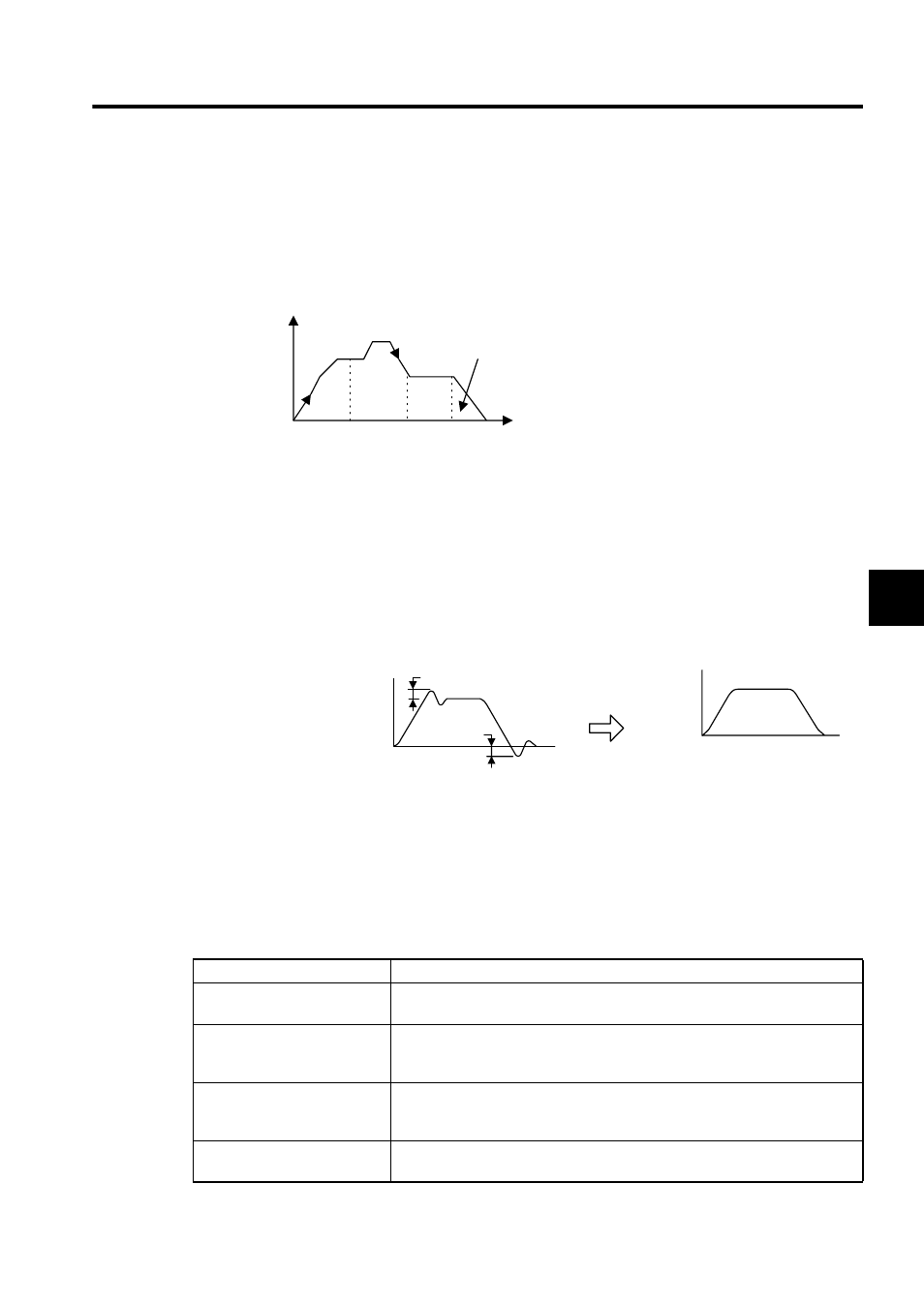
SGDH SERVOPACK Speed Loop P/PI Switching during Operation
Application examples are given below.
• Suppressing overshoot during acceleration.
• Suppressing undershoot and reducing setting time.
Speed loop P/PI switching is performed using the Operation Control motion setting parame-
ter (OBC0011).
Changing Parameters during Operation
The following parameters can be changed immediately during operation using a ladder or
motion program.
Without Speed Loop P/PI Control
Switching
With Speed Loop P/PI Switching
V
T
Speed
Synchro-
nous
phase
Torque
Position
Undershoot
Time
Motor
speed
Overshoot
Motor
speed
Time
Parameter
Method of Change
Target position
Can be changed using the Position Reference Setting motion setting parameter
(OLC012).
Speed
Can be changed using the Speed Control Setting motion setting parameter
(OWC015) and the Fast Forward Speed Setting motion setting parameter
(OLC022).
Acceleration and deceleration
time constant
Can be changed using the Linear Acceleration Time Constant motion setting
parameter (OWC00C) and the Linear Deceleration Time Constant motion setting
parameter (OWC00D).
Position loop gain
Can be changed using the Position Loop Gain motion setting parameter
(OWC010).