4 position control using motion commands, 1 overview of motion commands – Yaskawa MP940 User Manual
Page 452
Motion Control
11.4.1 Overview of Motion Commands
11-50
11.4 Position Control Using Motion Commands
This section describes position control using motion commands.
11.4.1 Overview of Motion Commands
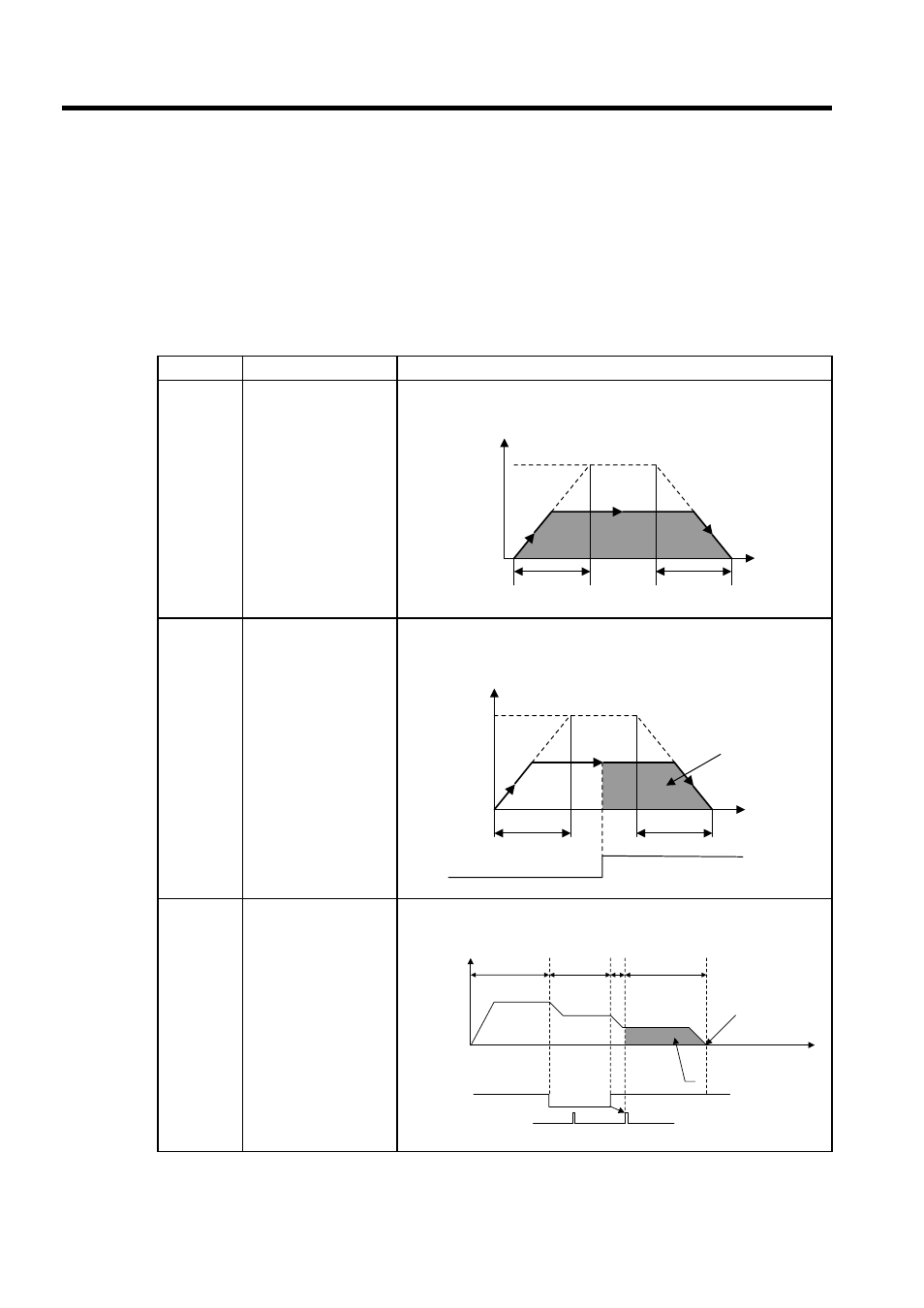
The following table lists the motion commands and gives an overview of each.
Command
Name
Description
1
Positioning (POSING)
Positions the axis at the specified position using the specified acceleration/
deceleration time constant and speed.
2
External Positioning
(EX_POSING)
Latches a counter when a latch signal (external positioning signal) is input
during positioning (POSING), and positions the axis at a position where it
has traveled the external positioning travel distance from that position.
3
Zero Point Return
(ZRET)
Returns the system to the machine coordinate system zero point. Eight zero
return modes are provided.
(
100%)
0
Speed
(%)
Rated speed
Rapid
traverse
speed
Position
reference
Linear acceleration
time constant
Linear deceleration
time constant
Time
(t)
(
100%)
0
Speed
(%)
Rated speed
Rapid
traverse
speed
Time
(t)
Linear acceleration
time constant
Linear deceleration time constant
Latch signal (external positioning
signal)
External posi-
tioning travel
distance
0
1.
2.
3.
4.
Reverse
Forward
← →
Zero point
Speed
reference
Rapid traverse
speed
Approach
speed
Creep speed
Zero point
return position
Time
Zero point return final
travel distance
Dog (Decel-
eration limit
Zero point signal
(Phase-C pulse)