Yaskawa MP940 User Manual
Page 282
Parameters
6.3.3 Motion Monitoring Parameter Details
6-42
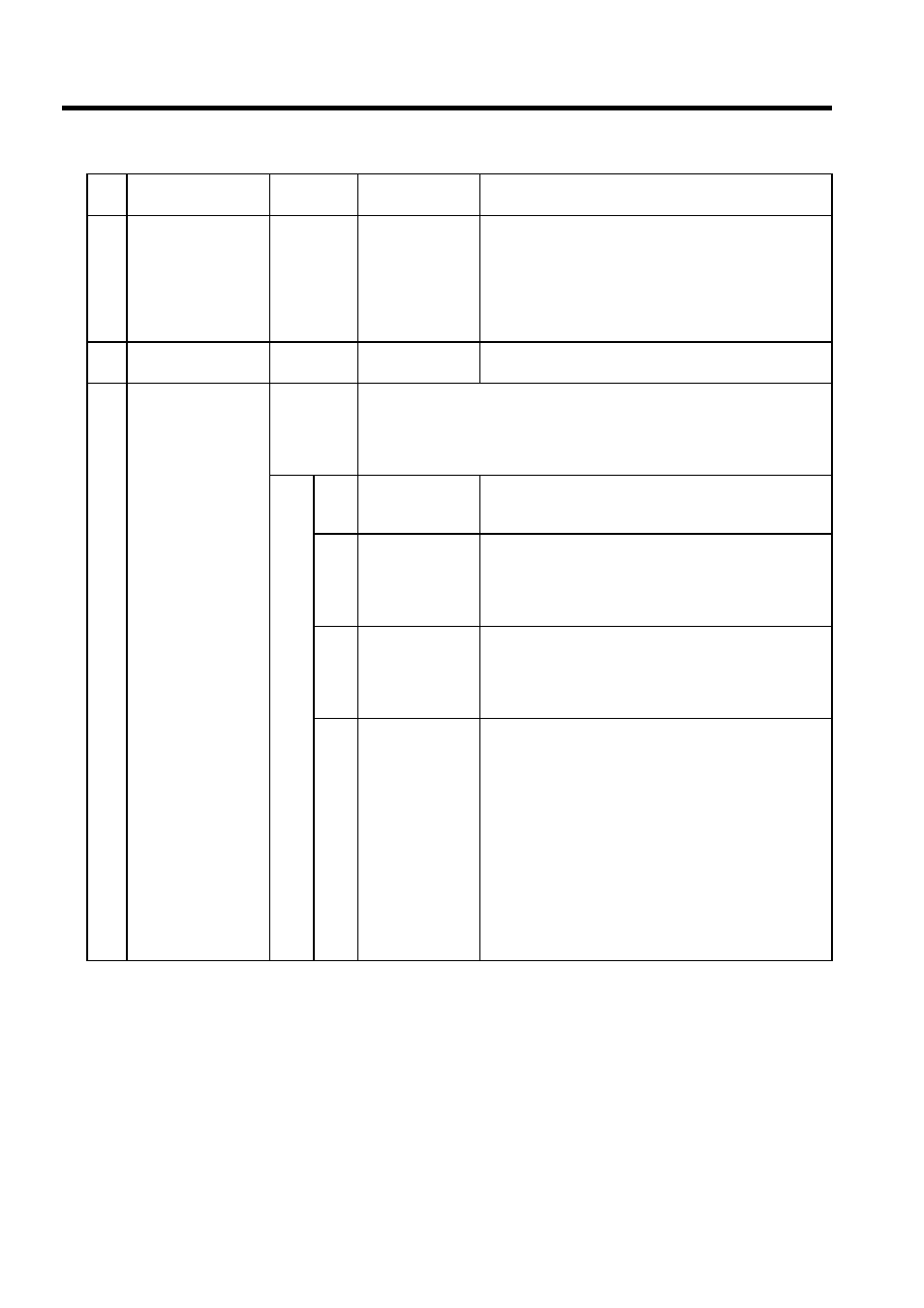
31
Number of POSMAX
Turns (PMAXTURN)
ILC01E
-2
31
to 2
31
-1
The count at this parameter goes up and down every time the
reset position (POSMAX) for the infinite length axis at
motion fixed parameter 23 is exceeded. The parameter can
be preset with OLC030: Preset Number of POSMAX Turns
and with OBC02D1: Request for Preset Number of POS-
MAX Turns and is valid in Position Control Mode when an
OWC020: Motion Command Code is used.
33
Serial Command
Data Monitor
ILC020
(Reserved for sys-
tem use)
Data monitor during SGDH serial command execution
35
Alarms (ALARM)
ILC022
The following bits are valid in Position Control Mode when an OWC020: Motion
Command Code is used. Alarm data and a halt to operation are indicated if this
register shows anything other than “0.” The register can be cleared by starting up
OBC0006: Alarm Clear.
The following shows the bit configuration.
Bit
0
Servo Amp Error
This bit turns ON when the Servo Alarm (IBC0010) is ON,
or when there is a synchronous access error between the
MP940 and SGDH.
1
Positive Overtravel This parameter turns ON when the positive overtravel signal
is input and a move command is executed in the positive
direction. It is valid if Enabled is selected at bit 13 of Motion
Controller Function Selection Flags: Positive Overtravel
Selection is enabled in motion fixed parameter 17.
2
Negative Over-
travel
This parameter turns ON when the negative overtravel signal
is input and a move command is executed in the negative
direction. It is valid if bit 14 of Motion Controller Function
Selection Flags: Negative Overtravel Selection is enabled in
motion fixed parameter 17.
3
Positive Software
Limit (SOTF)
This parameter is valid if IBC0156: Zero Point Return Com-
pleted turns ON when the positive software limit is enabled
and an infinite length axis is selected.
1. OWC020: Motion Command Code Interpolation
This bit turns ON when ILC018: Reference Position in
Machine Coordinate System + OLC026: Stopping Dis-
tance
Positive
Software
Limit (motion fixed parame-
ter no. 27).
2. OWC020: Motion Command Codes Positioning, Feed,
or Step
This bit turns ON when ILC018: Reference Position in
Machine Coordinate System ≧ Negative Software Limit
(motion fixed parameter no. 27).
No.
Name
Register
No.
Bit Name
Description
≥