User program example example of run operation – Yaskawa MP940 User Manual
Page 427
11.2 Control Modes
11-25
11
A user program must be created to connect the Limit Switch Signal DECLS (the DI signal included in
the LIO Module) to the Zero Point Return Deceleration Point Limit Switch LSDEC (bit 15 of
OWC001).
c) When LSDEC turns from ON to OFF, the point detected by the initial zero point
pulse (Phase-C pulse) is the zero point position. The axis is decelerated to a stop after
detecting the initial zero point pulse.
d) After decelerating to a stop, the axis is moved only the zero point overtravel distance
at creep speed in the zero point position direction and stops at the zero point position.
A zero point position offset value can also be set. (If Machine Coordinate System
Zero Point Offset OLC006 is set in advance to 100, the position data will be 100.)
4. End of Zero Point Return Mode
The zero point return operation is completed when the axis enters the positioning com-
pleted range. When the zero point return operation is completed, the Zero Point Return
Completed Signal ZRNC (bit F of IWC000) turns ON. After checking that the zero
point return completion signal (ZRNC) is turned ON, set the RUN command (RUN) and
the zero point return mode (ZRN) to OFF.
User Program Example
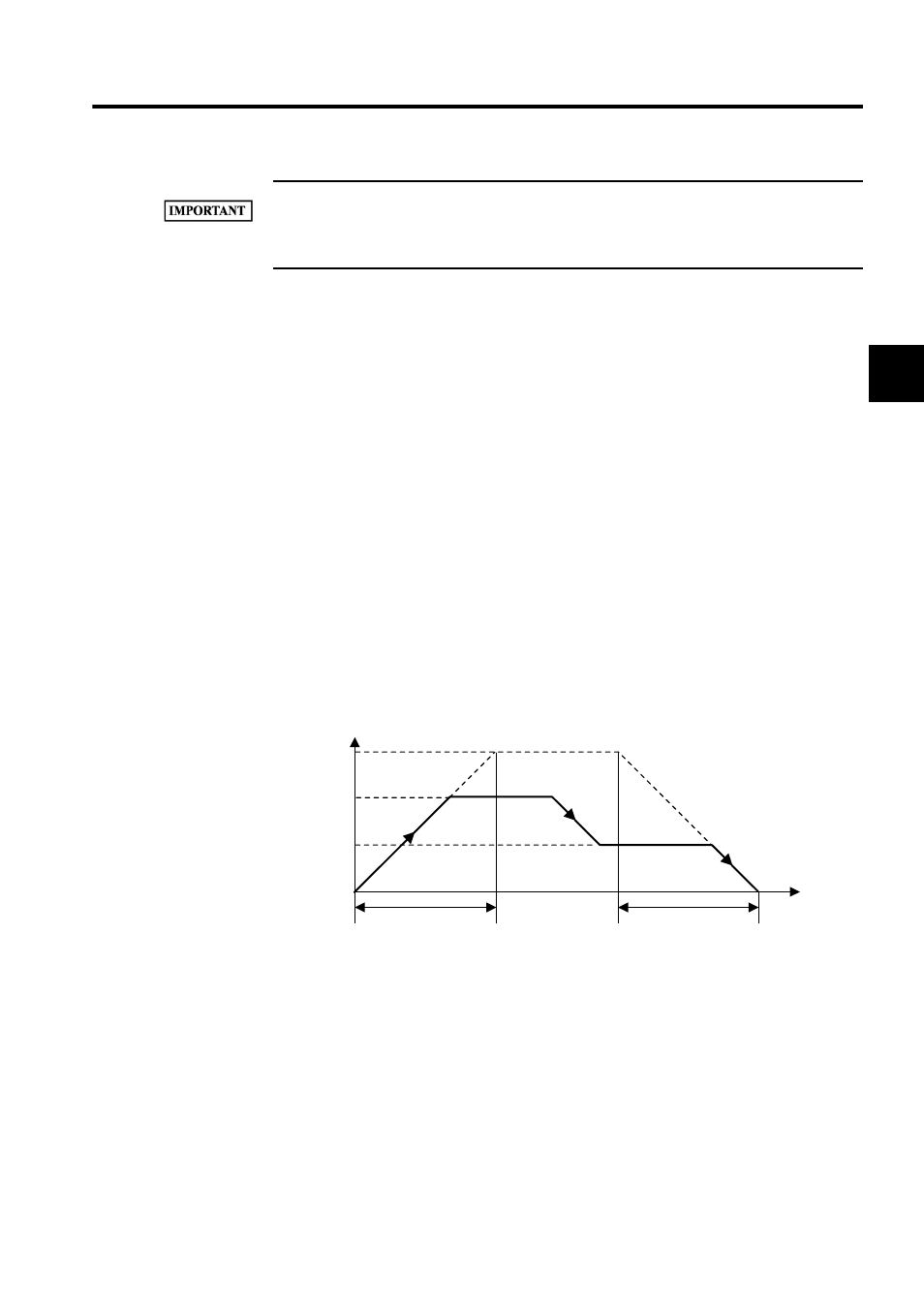
Example of RUN Operation
Fig 11.14 Zero Point Return Pattern
NR
(
100%)
0
NACC
NDEC
Napr
Nclp
Speed
(%)
Approach speed
Creep speed
Time
(t)