Yaskawa MP940 User Manual
Page 269
6.3 SVA Parameter Details
6-29
6
34
Motion Command
Control Flag
(MCMDCTRL),
continued
Bit
12
Reverse Limit
Signal for Zero
Point Return
(LMT_L)
This bit functions as a reverse limit signal when
returning to the zero point (ZRET). The external
signal in the user program must be connected (i.e.,
programmed) to OBC021C.
0
13
Forward Limit
Signal for Zero
Point Return
(LMT_R)
This bit functions as a forward limit signal when
returning to the zero point (ZRET). The external
signal in the user program must be connected (i.e.,
programmed) to OBC021D.
0
14
Position Buffer
Write (BUF_W)
Data set in OLC03A: Position Buffer Write Data is
stored as absolute position data in the position
buffer that is set at OLC038: Position Buffer
Access Number.
0
15
Position Buffer
Read (BUF_R)
Data from the position buffer that is specified at
OLC038: Position Buffer Access Number is stored
as absolute position data in the position buffer that
is set at ILC028: Position Buffer Read Data. This
parameter is used to check position data that is
stored in the position buffer. It takes two scans
from the time the Position Buffer Read command
is issued until the data is stored at ILC028: Posi-
tion Buffer Read Data.
0
35
Rapid Traverse
Speed (RV)
OLC022
0 to 2
31
-1
Set the rapid traverse speed in 10
n
reference units/
min (n: Number of digits below decimal point) if
OBC001D: Speed Reference Selection is set to
“0.”
Other setting units are expressed as follows:
Pulse unit: 1 = 1000 pulses/min
mm unit: 1 = 1 mm/min
deg unit: 1 = 1 deg/min
Inch unit: 1 = 1 inch/min
This parameter is used when an OWC020: Motion
Command Code is used in Position Control Mode.
3000
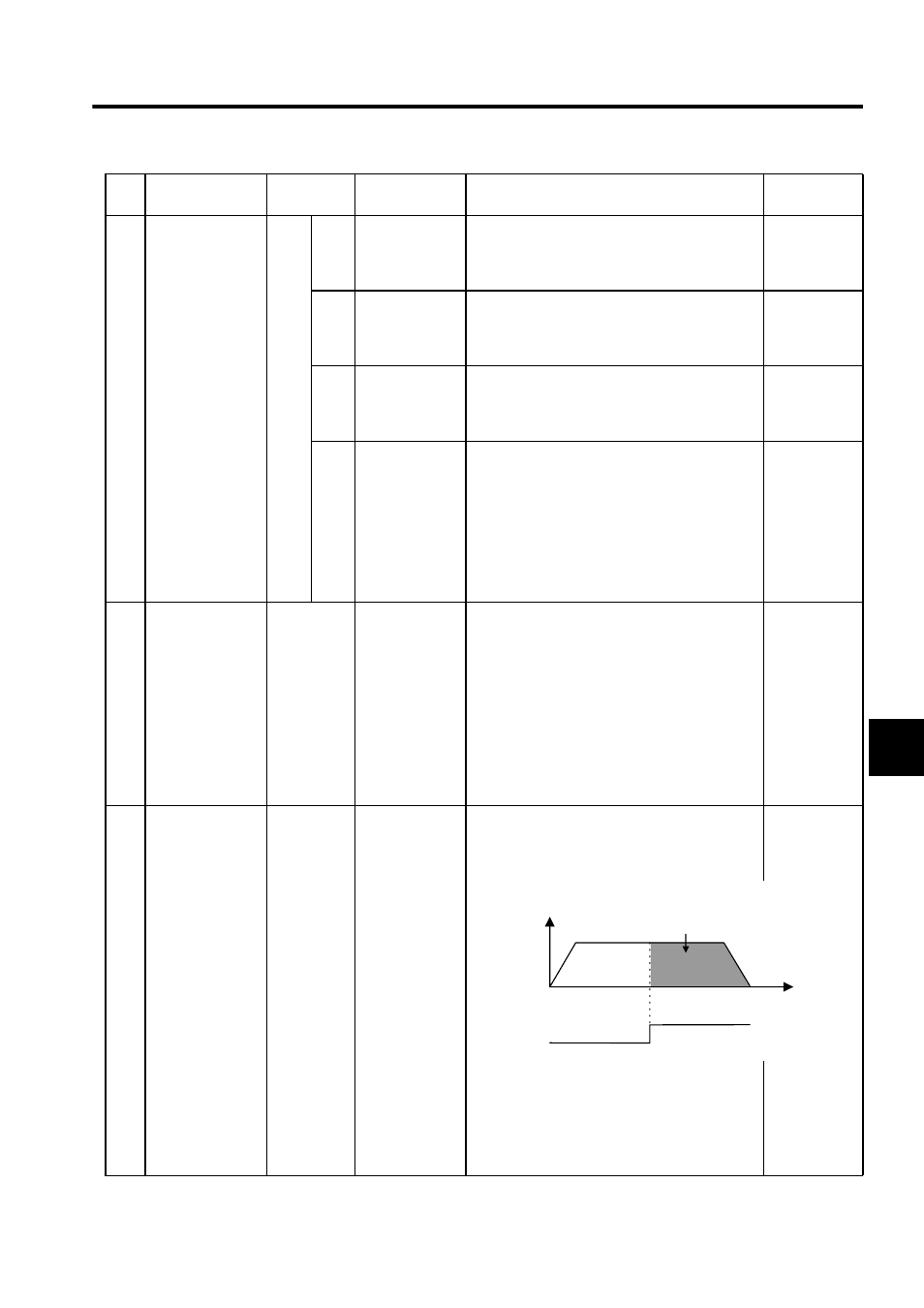
37
External
Positioning Travel
Distance
(EXMDIST)
OLC024
-2
31
to 2
31
-1
Set the distance from the time the latch signal
(external positioning signal) is input until the
machine stops during external positioning
(EX_POSING).
0
This parameter is used when an OWC020: Motion
Command Code is used in Position Control Mode.
Select either of the following latch signals using
fixed parameter No. 13, DI Latch Signal Selection.
Latch selection = DI input signal (EXT3) or C-
pulse input signal.
No.
Name
Register
Number
Bit Name
Description
Default
v
t
External positioning
travel distance
Latch signal