3 motion command descriptions – Yaskawa MP940 User Manual
Page 31
Specifications and Functions
2.3.3 Motion Command Descriptions
2-8
2.3.3 Motion Command Descriptions
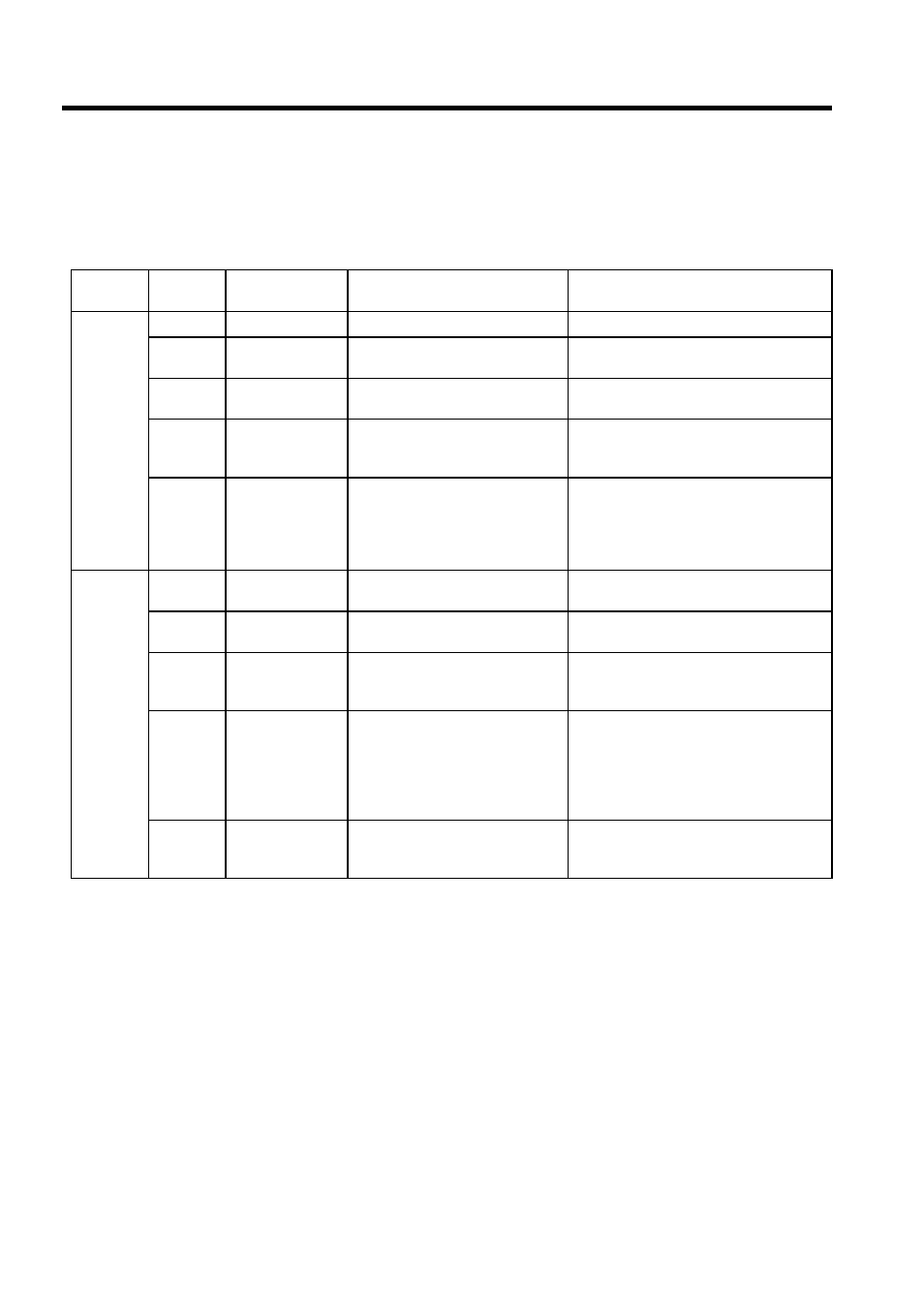
The following table describes the motion commands.
Table 2.5 Motion Command Descriptions.
∗
“ - ” in MOV[axis1] - •••; denotes the numeric data for axis 1.
Classifica-
tion
Command
Name
Programming Format
Function/Meaning
Axis Move
Com-
mands
MOV
POSITIONING
MOV [axis1] - ; *
Executes positioning at rapid traverse speed.
MVS
LINEAR INTER-
POLATION
MVS [axis1] - F - ;
Executes linear travel at interpolation feed
speed F.
ZRN
ZERO POINT
RETURN
ZRN [axis1] - ;
Returns axis to its zero point.
SKP
SKIP
SKP [axis1] - SS - F - ;
If the SKIP signal turns ON during a linear
interpolation operation, skips the remaining
movement and proceeds to the next block.
EXM
EXTERNAL PO-
SITIONING
EXM[axis1]- D - ;
When an external positioning signal is input
while external positioning is being executed,
only the travel distance designated by “D-" is
positioned with an incremental value, and
then the next command is executed.
Basic
Control
Com-
mands
ABS
ABSOLUTE
MODE
ABS;
Treats all subsequent coordinate words as
absolute values.
INC
INCREMENTAL
MODE
INC;
Treats all subsequent coordinate words as
incremental values.
POS
CURRENT POSI-
TION SET
POS [axis1] - ;
Changes the current values to the desired
coordinate values. Subsequent move com-
mands use this new coordinate system.
MVM
MOVE ON MA-
CHINE COORDI-
NATE
MVM MOV [axis1] - ;
or
MVM MVS [axis1] - ;
Goes to the target position on the machine
coordinate system. The coordinate system
set automatically on completion of the zero
point return is called a machine coordinate
system. This coordinate system is not
affected by the POS command.
PLD
PROGRAM CUR-
RENT POSI-
TION UPDATE
PLD [axis1] ;
Updates the program current position for
axes shifted by manual intervention.