Sg dh – Yaskawa MP940 User Manual
Page 459
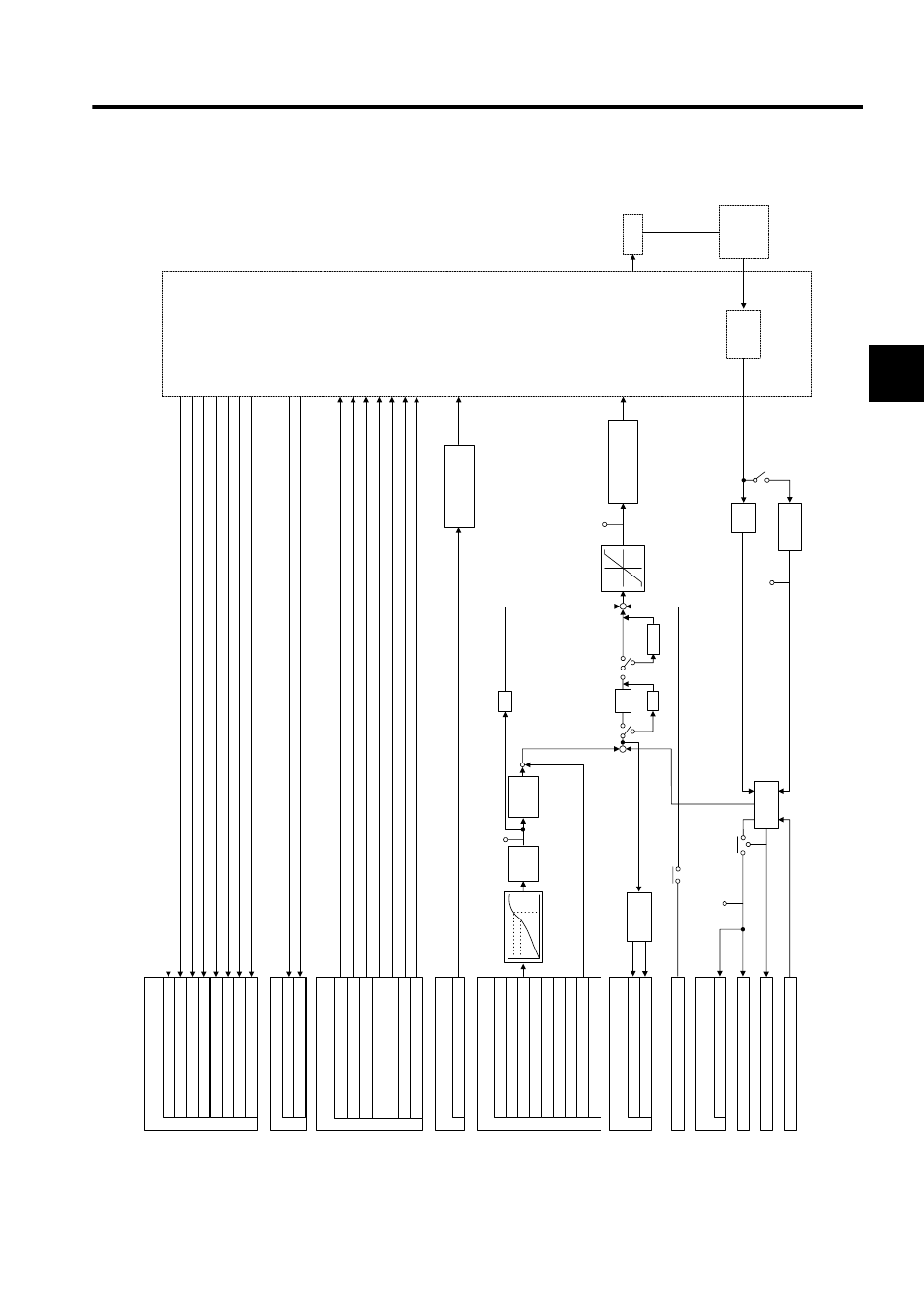
11.4 Position Control Using Motion Commands
11-57
11
Fig 11.21 MP940 SVA Position Control Mode Block Diagram
)
OWC
0
04
(NLIMP
)
0
OW
C005
(NLIMN
)
SG
DH
IW
C00C
(S
PDRE
F
)
ILC
006
(L
P
O
S
)
IL
C008
(AP
OS)
IL
C010(A
BSR
EV)
ILC012
(I
P
U
LS
E)
p
t
δp
ts
IL
C004
(P
T
G
DI
F)
OWC
011
OWC
010
OBC0
21A
Kp
PI
OWC
0035
OWC
0036
O
W
C0
037
Kf
S
er
vo
dr
iv
e s
tatus
(
IWC00
1)
S
IO
: G
e
neral
inp
ut
-
--DI0
P
E
C: De
ce
lerati
on L
S
---
DI1
P-
OT
: P
o
si
tive
OT
---DI2
N-
O
T: N
egati
ve
OT
-
--
D
I3
E
X
T1: E
xternal
inp
ut s
ign
al 1
-
-DI4
E
X
T2: E
xternal
inp
ut s
ign
al 2
-
-DI5
E
X
T3: E
xternal
inp
ut s
ign
al 3
-
-DI6
AL
M: Ser
vo
al
ar
m
--DI7
Ana
log
mo
ni
to
r
S
pe
ed mo
nito
r (
IW
C
00D)
To
rq
u
e m
on
ito
r (IWC0
0E
)
S
p
ee
d mo
ni
to
r
To
rq
ue
m
on
ito
r
RUN c
o
mma
nd (OWC00
1)
Ru
n (RUN
)
-
--DO
0
S
p
ee
d lo
op
P/PI
co
ntro
l
---DO1
Gain
sele
ction
--
-DO
2
Ex
te
rna
l p
o
si
tive
to
rqu
e
li
m
it i
n
pu
t --DO
3
Ex
te
rna
l n
ega
tiv
e torq
ue
li
m
it i
n
pu
t -
-DO
4
Ze
ro
cl
am
p
in
pu
t
---DO
5
S
e
nso
r ON (
SEN)
To
rq
u
e lim
it
se
tting
P
osit
ive to
rq
ue
lim
it se
tting
(O
W
C
002
)
To
rq
ue r
efer
en
ce
co
nv
er
si
on
Tor
que re
fer
ence
(t
or
qu
e li
m
it)
Pa
ra
mete
rs
for po
si
tion
c
o
ntrol
Lin
ear
ac
ce
ler
ati
on t
ime
(
O
W
C
00C)
Lin
ear
dec
el
er
ati
on ti
me (
O
WC0
0D)
S
pe
ed r
efe
re
nce
set
ting
(
O
W
C
015)
P
o
sit
ion ref
e
rence pulse set
ting (O
LC012)
P
o
sit
ion loop
ga
in
set
ting (O
W
C
010)
F
eed f
o
rw
ard gai
n set
ting (O
W
C
01
1)
P
o
si
tion
ing c
om
pl
ete
d r
ang
e s
etti
n
g (
O
W
C
00
E
)
P
o
si
tion
de
vi
ati
on
er
ro
r d
ete
cti
on
val
u
e (
O
W
C
00
F)
C
o
mp
en
sati
o
n pu
ls
e s
etti
n
g (
O
LC
0
1E
)
P
os
itio
n p
att
er
n
ge
ner
ati
on
Fil
te
r
NNUM
Tar
get
pos
i-
tion
com
pu
ta-
tion
RU
N st
a
tu
s (IWC0
00
)
Dev
iati
on e
rr
or
(
IBx
x000)
P
osi
tion
in
g
com
pl
et
ed
si
gna
l (IB
xx
00D
)
D
eviat
ion
judgem
ent
Pr
im
a
ry
delay
S
peed
lim
it
S
p
eed r
ef
er
enc
e
conv
er
si
on
S
peed
r
e
fe
rence
Mot
o
r
S
peed compen
sat
ion set
ting (O
W
C
018)
RUN st
a
tus (IWC
00
0)
DI
lat
ch c
omplet
ed s
ignal
(I
B
C
000B
)
M
ach
in
e
coo
rdi
n
ate
la
tch
po
si
tion
(I
LC
00
8)
Ma
chi
ne c
oor
di
na
te f
eed
ba
ck
(I
LC
00
6)
Exte
rn
al
la
tch
si
gn
al
P
res
ent pos
iti
on
com
pu
tatio
n
Multi
p
li-
cat
ion
Re
ce
ivin
g
a
bso
lute
po
si
tion
da
ta
Ab
solute
en
cod
e
r
D
iv
id
er
A
bsolut
e/
in
cr
e
m
e
n
-
ta
l e
n
coder
Z
e
ro
po
in
t o
ffs
et
(O
LC
00
6)