Absolute data, Holding absolute data, Battery – Yaskawa MP940 User Manual
Page 317
7.1 Structure of the Absolute Position Detection Function
7-3
7
Absolute Data
Absolute data that is stored in an absolute encoder is comprised of the number of rotations
(N) from the absolute reference position and position (PO) in one servomotor rotation. This
absolute data is read as serial data when the machine is turned ON.
All other operations are the same as that for ordinary incremental encoders.
In other words, we can determine the absolute position P using the following:
The absolute position (P) can be expressed as:
Holding Absolute Data
An absolute encoder uses a battery to maintain absolute data at all times even though power
is turned OFF. It also updates data if there is a change.
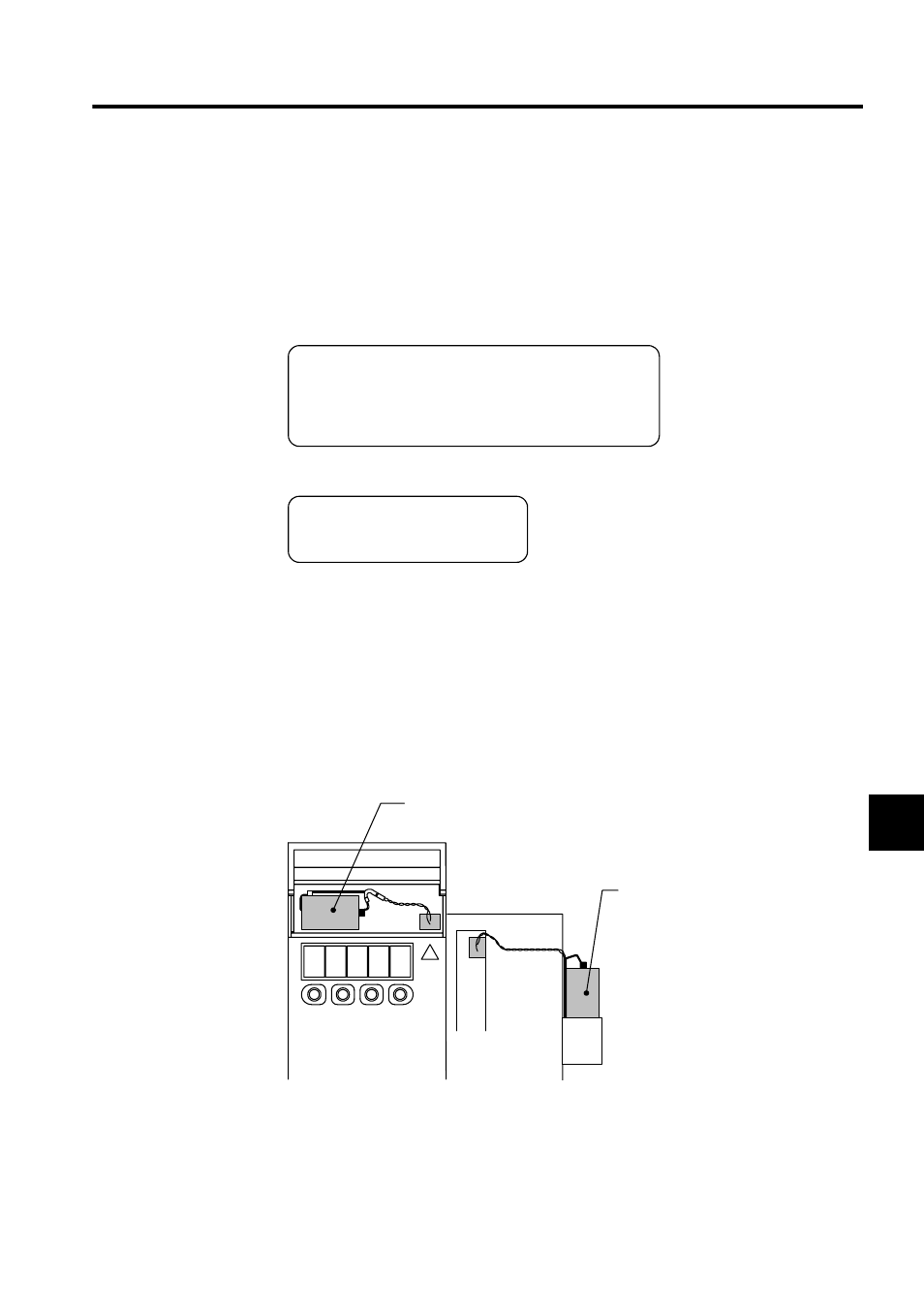
Battery
When using an absolute encoder, you must supply a position information memory battery to
the MP940 Module and SGDH SERVOPACK.
• Number of rotations from the absolute reference position: N
• Number of pulses per one servomotor rotation: RP
• Position in one servomotor rotation: PO
=
N×RP+PO
Absolute position
(P)
Absolute encoder position
information memory battery
RAM backup and absolute
position information memory
battery
SGDH
SERVOPACK
MP940
Module