Yaskawa MP940 User Manual
Page 267
6.3 SVA Parameter Details
6-27
6
27
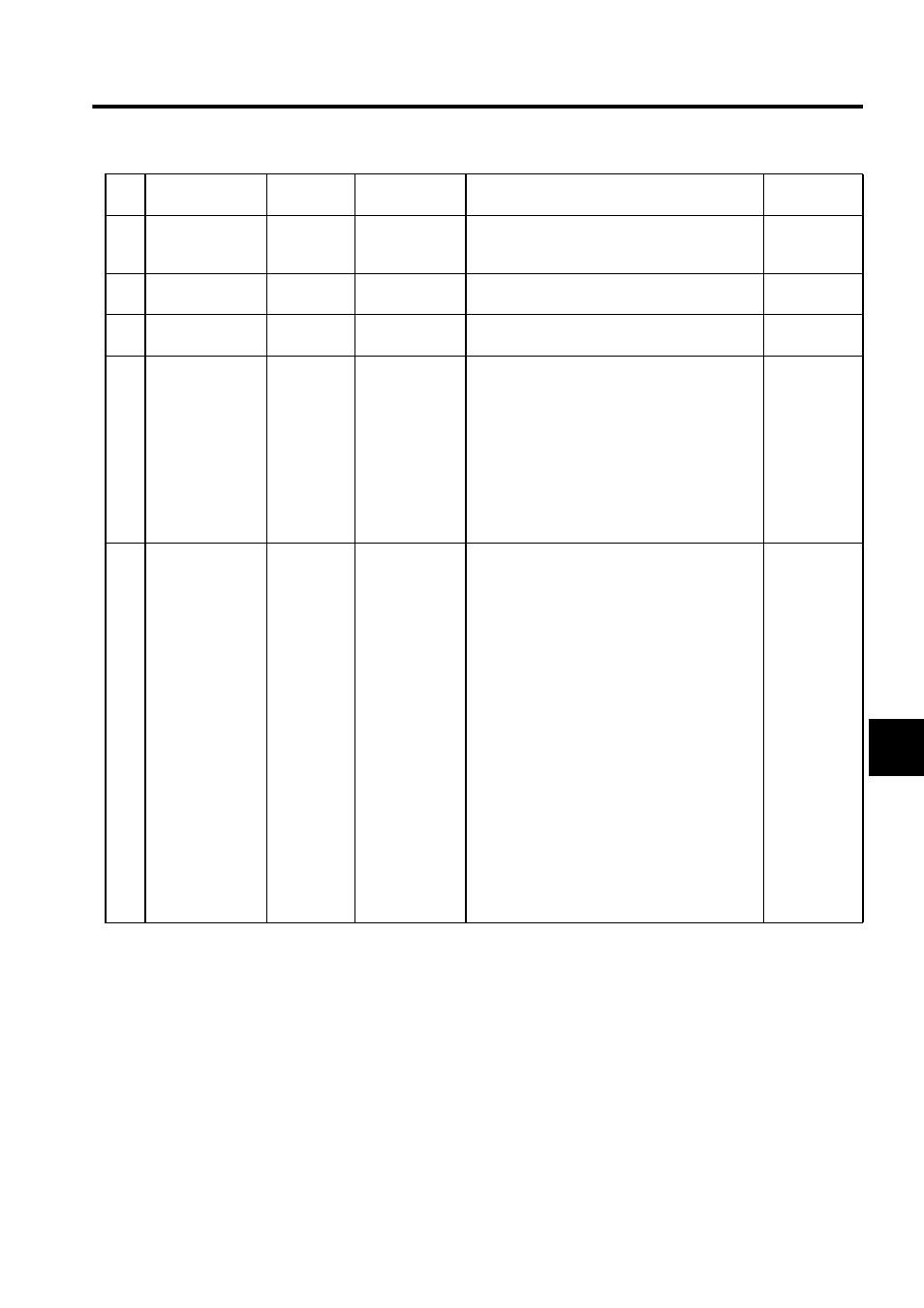
Integral Time
Setting (Ti)
OWC01A
0 to 32767
Set the integral time for PI control in 1 ms units in
Phase Control Mode. Integration will be reset if
the integral time is set to 0.
300
(300ms)
28
Torque Reference
Setting (TREF)
OWC01B
-32768 to 32767
Set the torque reference in 0.01% units in Torque
Reference Output Mode.
0
29
Speed Limit
Setting (NLIM)
OWC01C
-32768 to 32767
Set the speed limit in 0.01% units in Torque Refer-
ence Output Mode.
15000(150.00
%)
31
Pulse Bias
Setting
(PULBIAS)
OLC01E
-2
31
to 2
31
-1
This parameter is used in Position Control Mode.
Position Control Mode
Set the number of compensation pulses.
OWC020: Motion Command Code Used in Posi-
tion Control Mode
This parameter is set in 1 pulse units when com-
pensating reference pulses such as with backlash
compensation. Compensation will not be per-
formed however if IBC0170: Machine Lock is
ON.
0
33
Motion Command
Code
(MCMDCODE)
OWC020
0 to 65535
Set the motion command code to the MP940 Mod-
ule. This parameter can be used under the follow-
ing conditions.
• Motion Command Selection (bit 7 of fixed
parameter no. 14)
• Position Control Mode Selection (OBC0002)
• RUN Mode Motion Setting Command Enabled
(OBC0008)
Motion Commands
0: NOP (no command)
1: Positioning (POSING)
2: External positioning (EX-POSING)
3: Zero point return (ZRET)
4: Interpolation (INTERPOLATE)
5: Do not use. Reserved for system use.
6: Interpolation with position detection
(LATCH)
7: Feed (FEED)
8: Step (STEP)
9: Zero point setting (ZSET)
10 to 65535: Not used
0
No.
Name
Register
Number
Bit Name
Description
Default